基于LM3S615的地下水位監測系統設計

(2)硬件接口
1)模式控制
模式控制接口由TRX CE、TX EN、PWR組成,控制PTR8000的四種工作模式:a.掉電和SPI編程模式;b.待機和SPI編程模式;c.發射模式;d.接收模式。各種模式的控制模式見表1所示。本文引用地址:http://www.104case.com/article/151740.htm

2)SPI接口
SPI接口由SCK、MISO、MOSI以及CSN組成。在配置模式下,單片機通過SPI接口配置PTR8000的工作參數;在發射/接收模式下,單片機SPI接口發送和接收數據。
3)狀態輸出接口
提供載波檢測輸出端口CD、地址匹配輸出端口AM、數據就緒輸出端口DR。
1.6 上位機界面設計
水位監測系統界面采用LabVIEW軟件進行設計。LabVIEW集成了與滿足GPIB、VXI、RS-232和RS-485協議的硬件及數據采集卡通訊的全部功能。內置了便于應用TCP/IP、ActiveX等軟件標準的庫函數。圖6為設計的系統界面。

2 系統測試結果及分析
系統測試方法為:模擬地下水環境,在水深約為2米的水槽中進行測試。測試前將傳感器接入,在不放入水中時,調節可變電阻使得系統顯示水位為0cm,取定量的水槽水樣進行標定。表2為實驗數據,其中h1為標尺讀數,h2為顯示讀數。

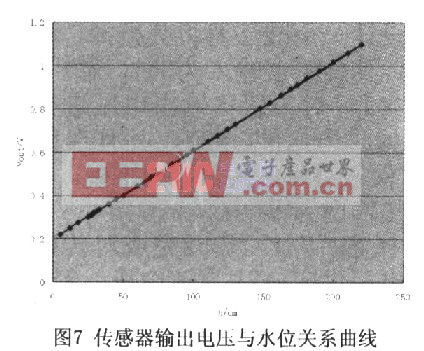
圖7中縱坐標是傳感器輸出電壓值Vout(單位:V),橫坐標為水位h(單位:cm),由圖可以看出傳感器輸出電壓與水位呈現良好的線性關系。由于不同的地方重力加速度和地下水密度都不完全相同,在每次測量時,可以測量一組數據,計算出系數,在軟件中進行矯正后再次測量,達到預定的目的。
從實驗數據可以看出顯示的水位深度與標尺讀數存在著誤差,分析產生誤差的主要原因為:a.讀取卷尺數值時,存在人為的誤差;b.從傳感器到數據采集模塊之間導線對信號的損耗。
3 結論
本文利用LM3S615控制器對信號進行處理并通過LCD顯示,控制PTR8000無線模塊對數據進行實時發送,上位機接收到信號后,通過串口傳輸給PC機,利用LabVIEW軟件對數據進行處理存儲,并繪制出實時水位曲線。本系統具有可靠、方便快捷等優點,減輕了觀測人員的勞動強度,且能實時準確地提供當前水位信息,為決策者提供可靠的依據。適合于水庫、地下井等水位的監測,具有廣泛的應用領域。










評論