基于ARM和FPGA的智能小車監控系統

0 引言
智能小車是機器人研究領域的一項重要內容。它集機械、電子、檢測技術與智能控制于一體。在各種移動機構中,智能小車的輪式移動機構最為常見。輪式移動機構之所以得到廣泛的應用,主要是因為容易控制其移動速度和移動方向。智能小車可以適應不同環境,不受溫度、濕度等條件的影響,完成危險地段、人類無法介入等特殊情況下的任務。一般的智能小車操作控制復雜、功能單一、不能遠程重構。
本文介紹的智能小車可移動視頻監控系統,以“飛思卡爾杯”智能小車競賽提供的車模裝置為基礎,利用ARM芯片S3C2440A控制圖像采集、網絡傳輸、速度采集干擾小的模塊,利用FPGA芯片控制電機驅動、舵機控制、電量采集干擾大的模塊,當上位機通過Internet訪問智能小車服務器時,在監控界面上點擊按鈕來控制小車的運行、圖像拍攝、速度采集。
1 系統總體設計
該系統采用三星公司的ARM芯片S3C2440A作為主控制芯片及Altera公司的FPGA芯片EP2C5T144C8作為輔助控制芯片,ARM上裝有Windows CE5.0操作系統。S3C2440A內置豐富的外設資源包括中斷控制器、GPIO、I2C、相機接口等接口電路,其內核為16/32位的ARM920T處理器,它集MMU,AMBA BUS和Harvard高速緩沖體系結構與一體,主頻可達400 MHz。
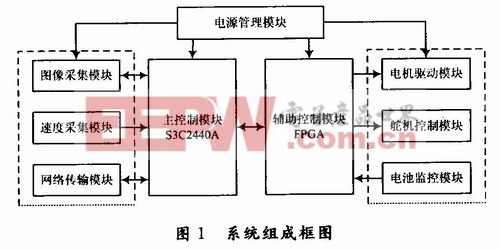
利用ARM9控制圖像采集、速度采集、網絡傳輸等功耗小、干擾弱的模塊;利用FPGA單獨控制功耗大、干擾強的直流電機、舵機、固態繼電器以提高系統的抗干擾能力。ARM9和FPGA以并行總線的方式進行數據和控制信號的傳輸,需要注意的是ARM的I/O口需要設置為禁止上拉,否則無法和FPGA進行通信。該系統具體組成如圖1所示。
2 系統硬件電路設計
2.1 圖像采集電路設計
圖像采集模塊選用OmniVision公司的CMOS圖像傳感器OV9650,可達130萬像素,具有標準SCCB(setial camera control bus)接口,通過該接口可以方便地設置圖像像素大小、輸出YCbCr順序、白平衡、色飽和等重要參數。
S3C2440A可以直接和CMOS圖像傳感器OV9650連接,如圖2所示。OV9650的PWDN引腳與S3C2440A的GPG12引腳相連,這樣可以控制OV9650的工作狀態。當無須采集圖像時,將GPG12輸出高電平,OV9650芯片處于掉電模式,節省電能消耗。OV9650可輸出YCbCr,RGB兩種格式的數據,當輸出YCbCr格式時,要用到數據線的D2~D9;當輸出RGB格式時,則需要用數據線D0~D9。本文采用YCbCr格式,數據線D2~D9與S3C2440A的CAMDATA0~CAMDATA7相連。

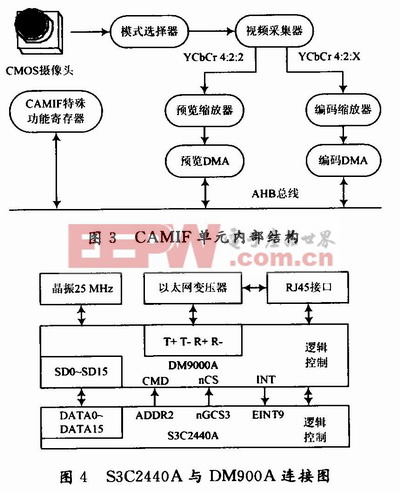
S3C2440A芯片具有相機接口CAMIF,其內部單元如圖3所示,CAMIF支持ITU-R BT.601/656YCbCr 8 b標準的圖像數據輸入,最大可采樣4 096×4 096像素的圖像。該接口可以使用兩種通道將圖像數據存儲在SDRAM中:一種是預覽通道模式,將從相機接口采集到的圖像數據轉為RGB數據,并在DMA控制下傳輸到SDRAM,這種模式通常用來提供圖像預覽功能;另一種是編碼通道模式,將圖像數據按照YCbCr 4:2:0或者YCbCr 4:2:2的格式傳輸到SDRAM,這種模式主要為JPEC,MPEG-4,H.263等編碼器提供圖像數據的輸入。
















評論