基于嵌入式的車輛偏離預警系統研究

式中,kL與kR為左、右道路標識線在平面圖像上的斜率,bL和bR為左、右道路標識線在v軸上的截距。結合圖像傳感器的安裝高度以及鏡頭焦距等參數,可以獲得車輛距道路標識線的橫向距離及橫向偏轉角,如圖l所示。本文引用地址:http://www.104case.com/article/151368.htm
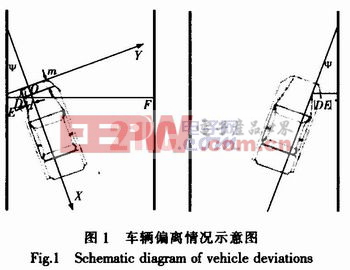
圖l中,點0代表攝像機鏡頭中心在路面的垂直投影點,點D代表車輛的左前輪,點D與CCD攝像機鏡頭中心在汽車縱向平面及橫向平面的距離分別為m,d,汽車縱向平面與道路標識線的夾角ψ稱為橫向偏轉角。
車輛在車道中的位置采用左前車輪距左標線的橫向距離|DE|或左前車輪距右標線的橫向距離|DF|表示。或者采用右前車輪距右標線的橫向距離|DE|’或右前車輪距右標線的橫向距離|DF|’表示,則根據三角幾何關系推導出的計算公式![]()
式中,bw為車輛輪距,BL、BR為左、右道路標線在Y軸上的截距,其值決定于道路標識線的空間方程。橫向偏轉角ψ表示汽車行駛過程相對于道路標識線的偏離方向,通過道路標識線空間方程計算得出,滿足tanψ=-KL,KL為左道路標線的斜率。








評論