基于MCU和DSP的步進(jìn)電機(jī)控制技術(shù)

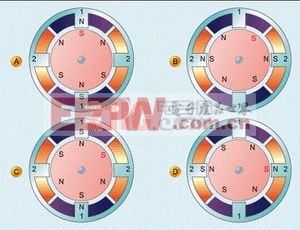
現(xiàn)在假設(shè)我們構(gòu)造一個(gè)定子上纏繞有兩個(gè)繞組的電機(jī),內(nèi)置一個(gè)能夠繞中心任意轉(zhuǎn)動(dòng)的永久磁鐵,這個(gè)可旋轉(zhuǎn)部分叫做轉(zhuǎn)子。圖2給出了一種簡(jiǎn)單的電機(jī),叫做雙相雙極電機(jī),因?yàn)槠涠ㄗ由嫌袃蓚€(gè)繞組,而且其轉(zhuǎn)子有兩個(gè)磁極。如果我們按圖2a所示方向給繞組1輸送電流,而繞組2中沒(méi)有電流流過(guò),那么電機(jī)轉(zhuǎn)子的南極就會(huì)自然地按圖中所示,指向定子磁場(chǎng)的北極。
再假設(shè)我們切斷繞組1中的電流,而按圖2b所示方向給繞組2輸送電流,那么定子的磁場(chǎng)就會(huì)指向左側(cè),而轉(zhuǎn)子也會(huì)隨之旋轉(zhuǎn),與定子磁場(chǎng)方向保持一致。
接著,我們?cè)賹⒗@組2的電流切斷,按照?qǐng)D2c的方向給繞組1輸送電流,注意:這時(shí)繞組1中的電流流向與圖2a所示方向相反。于是定子的磁場(chǎng)北極就會(huì)指向下,從而導(dǎo)致轉(zhuǎn)子旋轉(zhuǎn),其南極也指向下方。
然后我們又切斷繞組1中的電流,按照?qǐng)D2d所示方向給繞組2輸送電流,于是定子磁場(chǎng)又會(huì)指向右側(cè),從而使得轉(zhuǎn)子旋轉(zhuǎn),其南極也指向右側(cè)。
 本文引用地址:http://www.104case.com/article/151364.htm
本文引用地址:http://www.104case.com/article/151364.htm圖3:雙相6極電機(jī)
最后,我們?cè)僖淮吻袛嗬@組2中的電流,并給繞組1輸送如圖2a所示的電流,這樣,轉(zhuǎn)子又會(huì)回到原來(lái)的位置。
至此,我們對(duì)電機(jī)繞組完成了一個(gè)周期的電激勵(lì),電機(jī)轉(zhuǎn)子旋轉(zhuǎn)了一整圈。也就是說(shuō),電機(jī)的電頻率等于它轉(zhuǎn)動(dòng)的機(jī)械頻率。
如果我們用1秒鐘順序完成了圖2所示的這4個(gè)步驟,那么電機(jī)的電頻率就是1Hz。其轉(zhuǎn)子旋轉(zhuǎn)了一周,因而其機(jī)械頻率也是1Hz。總之,一個(gè)雙相步進(jìn)電機(jī)的電頻率和機(jī)械頻率之間的關(guān)系可以用下式表示:
fe=fm*P/2 (1)
其中,fe代表電機(jī)的電頻率,fm代表其機(jī)械頻率,而P則代表電機(jī)轉(zhuǎn)子的等距磁極數(shù)。
從圖2中我們還可以看出,每一步操作都會(huì)使轉(zhuǎn)子旋轉(zhuǎn)90°,也就是說(shuō),一個(gè)雙相步進(jìn)電機(jī)每一步操作造成的旋轉(zhuǎn)度數(shù)可由下式表示:
1 step= 180°/P (2)
由等式(2)可知,一個(gè)雙極電機(jī)每動(dòng)作一次可以旋轉(zhuǎn)180°/2=90°,這與我們?cè)趫D2中看到的情形正好相符。此外,該等式還表明,電機(jī)的磁極數(shù)越多,步進(jìn)精度就越高。常見(jiàn)的是磁極數(shù)在12和200個(gè)之間的雙相步進(jìn)電機(jī),這些電機(jī)的步進(jìn)精度在15°和 0.9°之間。
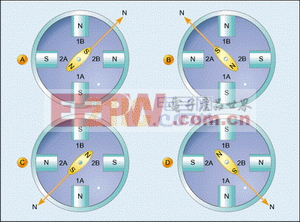
圖4:同時(shí)激勵(lì)電機(jī)的兩個(gè)繞組
圖3給出的例子是一個(gè)雙相、6極步進(jìn)電機(jī),其中包含3個(gè)永久磁鐵,因而有6個(gè)磁極。第一步,如圖3a所示,我們給繞組1施加電壓,在定子中產(chǎn)生一個(gè)北極指向其頂部的磁場(chǎng),于是,轉(zhuǎn)子的南極(圖3a中紅色的“S”一端)轉(zhuǎn)向了該圖的上方。接著,在圖3b中,我們給繞組2施加電壓,定子中產(chǎn)生一個(gè)北極指向其左側(cè)的磁場(chǎng)。于是,轉(zhuǎn)子的一個(gè)距離最近的南極轉(zhuǎn)向了圖的左方,即轉(zhuǎn)子順時(shí)針轉(zhuǎn)動(dòng)了30°。第三步,在圖3c中,我們又向繞組1施加一個(gè)電壓,在定子中產(chǎn)生一個(gè)北極指向圖下方的磁場(chǎng),從而又使轉(zhuǎn)子順時(shí)針旋轉(zhuǎn)30°到達(dá)圖3c所示的位置。而在圖3d中,我們給繞組2施加電壓,在定子中產(chǎn)生一個(gè)北極指向定子右側(cè)的磁場(chǎng),再一次使轉(zhuǎn)子順時(shí)針旋轉(zhuǎn)30°,到達(dá)圖3d所示的位置。最后,我們?cè)傧蚶@組1施加電壓,產(chǎn)生一個(gè)如圖3a所示的北極指向定子上方的磁場(chǎng),使得轉(zhuǎn)子順時(shí)針旋轉(zhuǎn)30°,結(jié)束一個(gè)電周期。如此可以看出,4步電激勵(lì)造成了120°的機(jī)械旋轉(zhuǎn)。也就是說(shuō),該電機(jī)的電頻率是機(jī)械頻率的3倍,這一結(jié)果符合等式(1)。此外,我們從圖3和等式(2)也能看出,該電機(jī)的轉(zhuǎn)子每一步旋轉(zhuǎn)30°。
圖5:可用于驅(qū)動(dòng)電機(jī)每個(gè)繞組的H橋電路
如果同時(shí)向兩個(gè)繞組輸送電流,還能增大電機(jī)的扭矩,如圖4所示。這時(shí),電機(jī)定子的磁場(chǎng)是兩個(gè)繞組各自產(chǎn)生的磁場(chǎng)的矢量和,雖然這一磁場(chǎng)每一次動(dòng)作仍然只使電機(jī)旋轉(zhuǎn)90°,就象圖2和圖3中一樣,但因?yàn)槲覀兺瑫r(shí)激勵(lì)兩個(gè)電機(jī)繞組,所以此時(shí)的磁場(chǎng)比單獨(dú)激勵(lì)一個(gè)繞組時(shí)更強(qiáng)。由于該磁場(chǎng)是兩個(gè)垂直場(chǎng)的矢量和,因此它等于單獨(dú)每個(gè)場(chǎng)的2×1.414倍,從而電機(jī)對(duì)其負(fù)載施加的扭矩也成正比增大。
電機(jī)的激勵(lì)順序
既然我們知道了一系列激勵(lì)會(huì)使步進(jìn)電機(jī)旋轉(zhuǎn),接下來(lái)就要設(shè)計(jì)硬件來(lái)實(shí)現(xiàn)所需的步進(jìn)序列。一塊能讓電機(jī)動(dòng)起來(lái)的硬件(或結(jié)合了硬件和軟件的一套設(shè)備)就叫做電機(jī)驅(qū)動(dòng)器。
從圖4中可以看出我們?cè)鯓蛹?lì)雙相電機(jī)的繞組才能使電機(jī)轉(zhuǎn)子旋轉(zhuǎn),圖中,電機(jī)內(nèi)的繞組抽頭分別被標(biāo)為1A、1B、2A和2B。其中,1A和1B是繞組1的兩個(gè)抽頭,2A和2B則是繞組2的兩個(gè)抽頭。
首先,要給腳1B和2B施加一個(gè)正電壓,并將1A和2A接地。然后,給腳1B和2A施加一個(gè)正電壓,而將1A和2B接地,這一過(guò)程其實(shí)取決于導(dǎo)線繞齒槽纏繞的方向,假設(shè)導(dǎo)線纏繞的方向與上一節(jié)所述相符。依次進(jìn)行下去,我們就得到了表1中總結(jié)的激勵(lì)順序,其中,“1”表示正電壓,“0”表示接地。
電流在電機(jī)繞組中有兩種可能的流向,這樣的電機(jī)就叫做雙極電機(jī)和雙極驅(qū)動(dòng)序列。雙極電機(jī)通常由一種叫做H橋的電路驅(qū)動(dòng),圖5給出了連接H橋和步進(jìn)電機(jī)兩根抽頭的電路。H橋通過(guò)一個(gè)電阻連接到一個(gè)電壓固定的直流電源(其幅度可根據(jù)電機(jī)的要求選取),然后,該電路再經(jīng)過(guò)4個(gè)開(kāi)關(guān)(分別標(biāo)為S1、S2、S3和S4)連接到繞組的兩根抽頭。這一電路的分布看起來(lái)有點(diǎn)象一個(gè)大寫字母H,因此叫做H橋。
圖6
從表1中可以看出,要激勵(lì)該電機(jī),第一步應(yīng)將抽頭2A設(shè)為邏輯0,2B設(shè)為邏輯1,于是,我們可以閉合開(kāi)關(guān)S1和S4,并斷開(kāi)開(kāi)關(guān)S2和S3。接著,需要將抽頭2A設(shè)為邏輯1,2B設(shè)為邏輯0,于是,我們可以閉合S2、S3,并斷開(kāi)S1和S4。與此類似,第三步我們可以閉合S2、S3并斷開(kāi)S1和S4,第四步則可以閉合S1、S4并斷開(kāi)S2、S3。
對(duì)繞組1的激勵(lì)方法也不外乎如此,使用一對(duì)H橋就能產(chǎn)生需要的激勵(lì)信號(hào)序列。表2所示就是激勵(lì)過(guò)程中每一步開(kāi)關(guān)所在的位置。
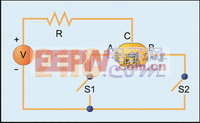
圖7:?jiǎn)螛O電機(jī)的控制電路
注意,如果R=0,而開(kāi)關(guān)S1和S3又不小心同時(shí)閉合,那么流經(jīng)開(kāi)關(guān)的電流將達(dá)到無(wú)窮大。這時(shí),不但開(kāi)關(guān)會(huì)被燒壞,電源也可能損壞,因此電路中使用了一個(gè)非零阻值的電阻。盡管這個(gè)電阻會(huì)帶來(lái)一定的功耗,也會(huì)降低電機(jī)驅(qū)動(dòng)器的效率,但它可以提供短路保護(hù)。














評(píng)論