基于CAN總線的數據通信采集系統

1.2 系統軟件設計:
系統軟件主要完成基于CAN 總線的數據通信, 并在接收數據之后按要求對采集的導航數據進行處理,轉換成實際所需數據類型,對陀螺組合的狀態進行監測。
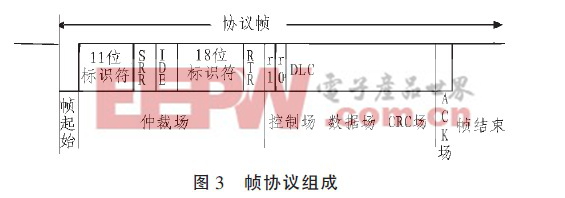
本系統CAN 總線通信報文格式采用CAN2.0B 擴展模式,通信數據格式主要是對CAN 總線協議中的(仲裁場ArbitrationField)和(數據場Data Field)進行定義,要求數據傳輸速率為500 Kb/s。協議幀格式如圖3 所示。
系統的接收軟件設計流程圖如圖4 所示。
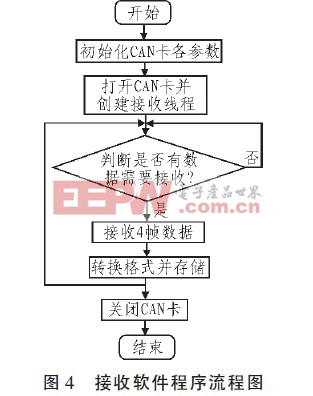
在使用CAN 接口卡之前首先要對卡進行波特率、傳輸報文格式等參數的初始化。
1) 初始化CAN 總線的傳輸報文格式為提供29 位地址的CAN2.0B 擴展模式;2) 初始化CAN 總線的波特率為500 Kb/s。
利用PCI/cPCI -7841CAN 接口卡的CanOpen-Driver () 函數打開CAN 端口, 用CanConfigPort () 函數進行初始化,用CanSendMsg()函數發送數據包,用Can-RcvMsg()函數接收數據包,用CanCloseDriver () 函數關閉端口[3]。創建接收線程,接收數據之后按要求對數據進行處理。應用MFC 制作通信界面。注意,線程函數只能是靜態成員函數,或者是在類外面聲明的一個函數。








評論