基于DSP控制的逆變器并聯

由圖3可以得到以下2個傳遞函數:
![]() =
=![]() (3)
(3)
![]() =
=![]() (4)
(4)
由式(3)、(4)可以看出,環流對輸出電壓的傳遞函數與輸入電壓對輸出電壓的傳遞函數的極點配置是一樣的。因此可以通過對輸入參考電壓的調節來減小環流對輸出電壓的影響,從而達到均流的效果。
3.2 均流控制方案設計
為了使得每個并聯逆變器的電流達到均等的目的,在每個并聯逆變器的控制環上除了電壓、電流雙環控制[3]之外還加了一個均流環。控制框圖如圖4所示。在均流控制中,主模塊通過DSP的CAN總線將采集到的主模塊電感電流和其參考電壓發送給各個從模塊。各從模塊接收到主模塊的電感電流數據后與自身的電感電流相比較,其誤差由均流環處理后來控制SPWM波形,以達到均流的目的。而主模塊的參考電壓使得各從模塊輸出電壓的相位與主模塊保持一致。逆變器控制中的電壓環使輸出電壓保持良好的正弦波,電流環的加入使得系統的動態響應得到提高,而均流環使得各個模塊能夠達到均流的目的。
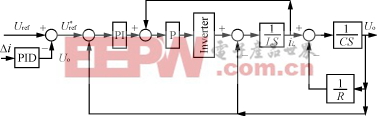
圖4 均流控制框圖
在控制方案中,均流環采用不完全微分PID控制,以減小通訊線傳輸中由于單個數據誤碼而對整個系統的沖擊。
4 電路仿真及波形
利用MATLAB對以上所設計的并聯控制方案進行仿真。仿真時的參數為:輸入直流母線電壓U1=U2=200V,輸出為50Hz有效值為100V的正弦波,開關頻率20kHz,L=2.7mH,C=4.5μF。其中電壓環采用PI控制,電流環采用P調節,均流環采用PID控制。仿真結果見圖5、圖6。
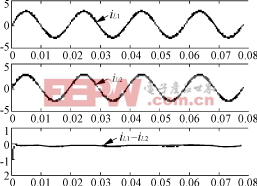
圖5 2臺并聯逆變器的電感電流波形
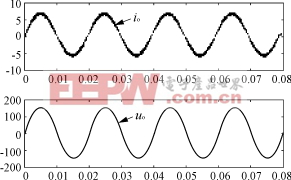
圖6 并聯逆變器輸出電流和電壓波形
5 實驗及波形
為驗證仿真結果,實驗采用2臺UPS并聯,具體的參數與仿真時相同,即U1=U2=200V,f=50Hz,輸出電壓設計為100V,L=2.7mH,C=4.5μF。
圖7為2臺逆變器輸出8A電流時各自輸出的電流,從實驗情況來看,2臺逆變器有很好的均流效果。
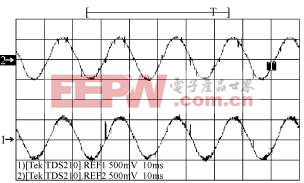
圖7 2臺逆變器的輸出電流

評論