SPCE061A在智能語音識別避障機器人中的設計應用

用戶只需要把前面的電源輸入跳線J2、測量模式選擇跳線J1設置好后,用排線把J5與SPCE061A的IOB口低八位相接,J4與IOB口高八位相接,即可使用了。
2.2.8 注意事項
◆提供給模組的電源必須在4.5V以上,而且盡量保持電源電壓的穩定。
◆模組外接電源接口J3接入的電源不要超過12V。
◆模組工作的性能與被測物表面材料有很大關系,如毛料、布料對超聲波的反射率很小,會嚴重影響測量結果。
◆模組的中距測距模式的精度與程序設計有關,提供的范例程序中沒有對測距結果進行標定,所以有3~5cm的距離誤差時是正常的。
2.3 機器人簡介
2.3.1 機器人驅動電路圖
機器人驅動電路圖如圖2-6所示:
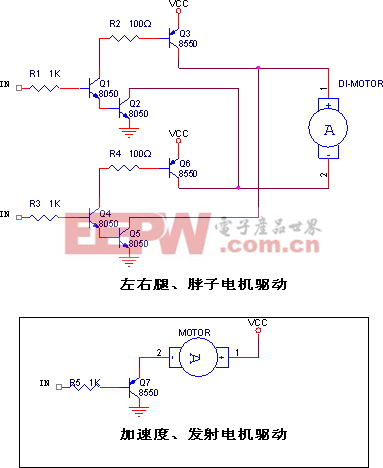
圖 2-6 機器人驅動電路圖
機器人驅動電路采用功率較大的三極管搭成H橋來驅動電機,可以實現電機的正向旋轉與電機的反向旋轉。這些電機包括2個用于走路的電機與一個頭部轉向的電機。另外用了一個三極管驅動單向旋轉的電機,包括加速電機與發射電機,驅動電路比較簡單。
2.3.2 主要功能
◆通過語音命令對其進行控制;
◆可以跳兩首舞曲;
◆走步功能、轉向功能、轉頭功能;
◆發射飛盤功能;
2.3.3 機器人實物圖

圖 2-7 機器人實物圖
2.3.4 注意事項
◆機器人在發射飛盤時不要面向人,避免受傷
◆機器人要輕拿輕放應該避免摔打
◆在安裝電池時注意正負極,否則容易燒壞機器人電機或主控制板
3 系統總體方案介紹
用61板來控制機器人,使用了IOA7-IOA15以及IOB2和IOB9資源,另外使用了揚聲器。如圖3-1所示:

圖 3-1 系統的結構框圖
系統主要由61板、超聲波測距模組和機器人驅動電路構成。61板作為整個系統的主控板,超聲波測距模組在機器人運動期間定期檢測前方是否存在障礙物,驅動電路驅動電機,在主控板61板的控制下完成各個動作。另外增加了特定人語音識別的功能,通過命令來控制機器人,使機器人智能化。
4 系統軟件設計
在主函數中調用相關函數完成特定人語音的訓練,然后在訓練成功后進行語音識別,根據識別的命令執行相關的操作。程序流程如圖4-1所示:
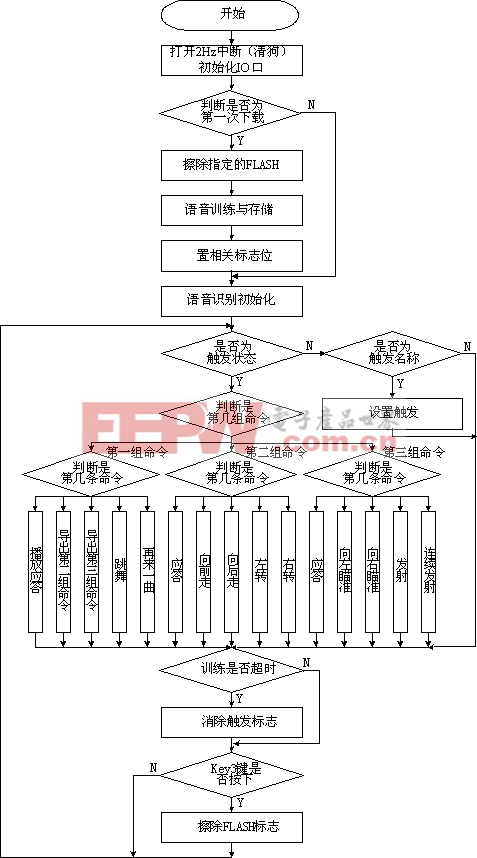
圖 4-1 主程序流程圖
根據FLASH中的標志位來進行判斷是否為第一次下載。使用庫函數BSR_ExportSDWord(uiCommandID)將訓練好的語音模型導出存儲到FLASH中進行操作,然后再調用讀寫FLASH函數。在進行語音識別時,首先讀取FLASH將語音模型取得,然后調用BSR_ImportSDWord(uiCommandID)函數將語音資源載入內存。在識別出命令后,執行相關動作,相關動作操作就是操作電機的正向或反向旋轉同時配合延時與播放聲音組合起來形成不同的動作。
避障的實現是在機器人活動期間完成的。
在機器人活動期間會播放背景聲音或音樂。播放采用后臺方式,使用4096Hz時基中斷處理語音解碼。這樣可以釋放大量CPU資源在前臺處理其他事務。
語音播放函數流程圖如圖4-2所示。
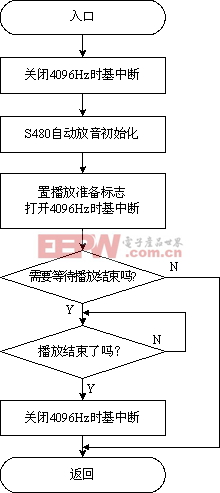
圖 4-2 語音播放程序流程圖







評論