SPCE061A在智能語音識別避障機器人中的設計應用

現代社會中機器人這個詞語已經不再新鮮,而且形形色色的機器人出現在我們的日常生活中。為了提高廣大單片機愛好者學習單片機的興趣,在凌陽科技教育推廣中心的興趣產品智能機器人的基礎上,配合超聲波傳感器的使用,使機器人具有障礙檢測功能。本文對這個避障機器人的軟硬件制作進行介紹。
1 引言
為了提高廣大單片機愛好者學習單片機的興趣,凌陽科技教育推廣中心推出了應用SPCE061A作為主控制器,外加電機驅動電路制作的智能機器人。該機器人采用特定人語音識別對機器人進行控制,可以完成向前走、倒退、左轉、右轉、跳兩首舞曲、向左瞄準、向右瞄準、發射、連續發射等功能。在此基礎上,配合凌陽科技教育推廣中心推出的超聲波測距模組,為機器人增加了活動過程中實時檢測前方障礙物、遇到障礙停止運動并向前方發射飛盤等功能,進一步豐富了機器人的功能,可以大大提高在校學生學習單片機的興趣。
2 模組特性簡介
2.1 SPCE061A特性簡介
SPCE061A是凌陽科技研發生產的性價比很高的一款十六位單片機,使用它可以非常方便靈活的實現語音的錄放系統,該芯片擁有8路10位精度的ADC,其中一路為音頻轉換通道,并且內置有自動增益電路。這為實現語音錄入提供了方便的硬件條件。兩路10位精度的DAC,只需要外接功放(SPY0030A)即可完成語音的播放。另外凌陽十六位單片機具有易學易用的效率較高的一套指令系統和集成開發環境。在此環境中,支持標準C語言,可以實現C語言與凌陽匯編語言的互相調用,并且,提供了語音錄放的庫函數,只要了解庫函數的使用,就會很容易完成語音錄放,這些都為軟件開發提供了方便的條件:
特性:
16位μ'nSP微處理器;
工作電壓:內核工作電壓VDD為3.0~3.6V(CPU),IO口工作電壓VDDH為VDD~5.5V(I/O);
CPU時鐘:0.32MHz~49.152MHz;
內置2K字SRAM;
內置32K閃存ROM;
可編程音頻處理;
晶體振蕩器;
系統處于備用狀態下(時鐘處于停止狀態),耗電小于2μA@3.6V;
2個16位可編程定時器/計數器(可自動預置初始計數值);
2個10位DAC(數-模轉換)輸出通道;
32位通用可編程輸入/輸出端口;
14個中斷源可來自定時器A / B,時基,2個外部時鐘源輸入,鍵喚醒;
具備觸鍵喚醒的功能;
使用凌陽音頻編碼SACM_S240方式(2.4K位/秒),能容納210秒的語音數據;
鎖相環PLL振蕩器提供系統時鐘信號;
32768Hz實時時鐘;
7通道10位電壓模-數轉換器(ADC)和單通道聲音模-數轉換器;
聲音模-數轉換器輸入通道內置麥克風放大器和自動增益控制(AGC)功能;
具備串行設備接口;
低電壓復位(LVR)功和低電壓監測(LVD)功能;
內置在線仿真板(ICE,In- Circuit Emulator)接口。
2.2 超聲波模組簡介
2.2.1 功能簡介
三種測距模式選擇跳線J1(短距、中距、可調距):
短距:20cm~100cm左右(根據被測物表面材料決定),精度1cm;
中距:70cm~400cm左右(根據被測物表面材料決定);
可調:范圍由可調節參數確定,當調節在合適的值時,最遠測距700cm左右;
2.2.2 電氣參數
超聲波傳感器諧振頻率:40KHz
模組傳感器工作電壓:4.5V~9V
模組接口電壓:4.5V~5.5V
2.2.3 超聲波發射電路原理圖
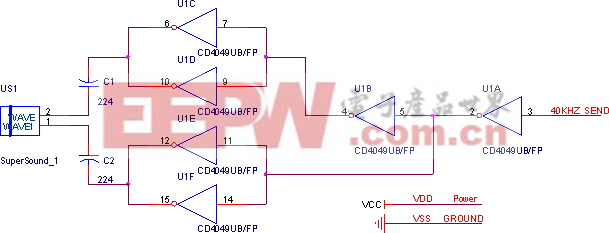
圖 2-1 超聲波諧振頻率調理電路原理圖
由單片機產生40KHz的方波,并通過模組接口(J4)送到模組的CD4049,而后面的CD4049則對40KHz頻率信號進行調理,以使超聲波傳感器產生諧振。
2.2.4 超聲波回波接收處理電路
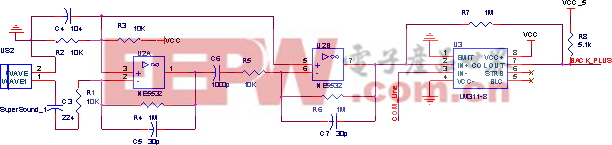
圖 2-2 超聲波回波接收處理電路
超聲波接收處理部分電路前級采用NE5532構成10000倍放大器,對接收信號進行放大;后級采用LM311比較器對接收信號進行調整,比較電壓為LM311的3管腳的輸入,可由J1跳線選擇不同的比較電壓以選擇不同的測距模式。
2.2.5 電源接口
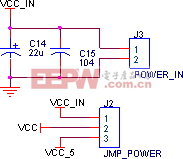
圖 2-3 超聲波模組的電源接口電路
為外部電源接口,最高電壓不要超過12V,J2為電源選擇跳線,VCC_5即為由61板通過10PIN排線引入模組的電源;VCC即為模組的放大器、調理電路的供電電源。當用戶使用61板為其供電時,要把VCC與VCC_5V短接;而使用外部電源時,要把VCC與VCC_IN短接。
2.2.6 測距模式選擇跳線
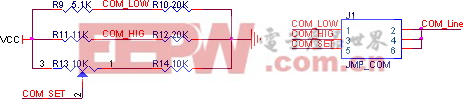
圖2-4 超聲波測距模式選擇跳線電路
模組提供了測距模式選擇跳線J1,可以選擇短距測量模式、中距測量模式,或距離可調模式。跳線選擇LOW時為近距測量模式,選擇HIG時為中距測量模式;選擇SET時為距離可調模式。凌陽科技大學計劃提供了短距測量模式和中距測量模式的完整程序(其中ultrasonic_Low為短距測量模式程序;ultrasonic_long為中距測量模式程序)。
2.2.7 模組接口
圖 2-5 超聲波模組接口電路







評論