基于DSP的電動助力轉向系統的設計

3. 2 電機電流控制算法
本系統使用的是數字PID控制器,其算法有位置式控制算法和增量式控制算法兩種。位置式PID控制算法為全量輸出,其產生的控制電動機的電流易產生方向盤振動,因此采用增量式PID控制算法來進行電動機電流的控制。
增量式PID控制算法表達式為:

式中:Un為控制量,也是電機驅動電路的輸入量;en為電機目標電流和實際電流之間的差值;kP為比例系數,kI為積分系數,kD為微分系數。
3.3 仿真結果分析
由于EPS的助力轉矩跟電動機的電流成正比,因此分析系統助力轉矩的變化就能得出系統助力電流的變化規律,從而研究EPS中電動機助力電流控制的算法。本文引用地址:http://www.104case.com/article/150492.htm
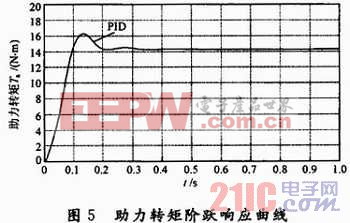
圖5是系統在Matlab中PID控制下電動機輸出的助力轉矩對方向盤輸入轉矩的階躍響應曲線,從中可以很明顯地看出,采用PID控制系統達到穩態值需要的時間短、超調量小,振蕩次數少,說明PID控制系統的穩定性和響應品質都比較好。因此,采用PID控制算法能較好地按照控制策略的要求提供轉向助力。
4 EPS系統軟件設計
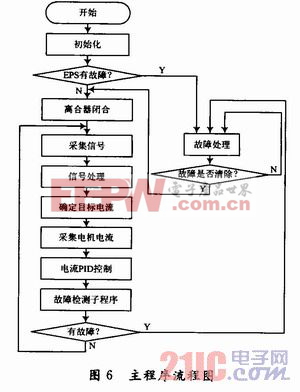
根據上述控制方法,設計了相應控制軟件。DSP上電后要進行特殊功能寄存器的初始化,包括定時器工作方式、A/D采樣方式設置等。初始化設置結束后,開始檢查EPS系統中的電機、離合器、扭矩傳感器等工作是否正常,如有故障則點亮警示燈進行報警,若一切正常則EPS系統開始正常的電動助力控制,主程序流程如圖6所示。整個程序還包括一些子程序、如系統初始化子程序、定時器中斷子程序、故障信號檢測子程序、信號采集濾波子程序等。
5 結論
TMS320LF2407A是一種新型16 bDSP,利用它作為控制核心,簡化了電動助力轉向系統的硬件電路的設計,有利于控制系統小型化。同時采用PID控制對電動機輸出電流進行閉環控制,系統助力跟隨性能好,響應速度快,控制精度高。











評論