磁懸浮列車運行控制系統仿真

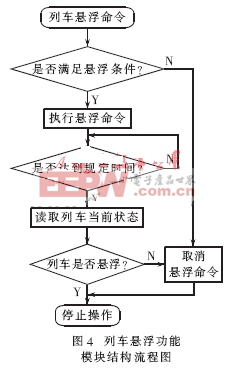
列車控制系統環境仿真機主要接收來自VSC的控制命令并執行相應的操作。環境仿真機每執行一個控制命令就對應著一個功能模塊,主要包括列車的啟動及停止、緊急停車管理、改變運行模式、列車懸浮、輔助控制面板、渦流制動、監督車輛控制裝置、車門監督等。本文僅給出了環境仿真機中的列車懸浮功能模塊結構流程圖。列車的懸浮必須滿足三個條件:有足夠的安全定位信息,沒有緊急停車信號和分區控制子系統工作正常。列車懸浮功能模塊的結構流程如圖4所示。
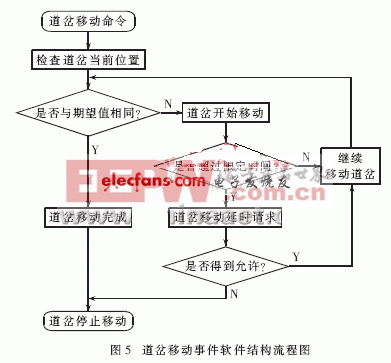
(3)道岔系統環境仿真機中的軟件結構
道岔系統環境仿真機收到DSM的道岔移動命令后開始移動道岔并將執行后的結果發送給DSM.道岔移動事件的軟件結構流程如圖5所示。
3 結 論
系統采用一般的PC機作為環境仿真機,通過通信鏈路的雙路冗余方式以及數字信號的動態輸入輸出方式提高磁懸浮列車運行的安全性,并得出以下結論:
(1)以太網和串行通信本身不具備安全性,應用到運行控制系統中必須采取特殊的安全措施以保證數據傳輸的安全。本實現方案采取了增加冗余通道和對報文進行安全處理等方法來保證磁懸浮列車運行控制系統通信鏈路的安全性。
(2)采用動態的輸入輸出信號,避免電子器件發生故障時導致的固定的0或1輸出對系統安全性的影響,保證了信號傳輸和系統控制的安全性。
(3)仿真環境中牽引供電系統環境仿真機、道岔系統環境仿真機和列車控制系統環境仿真機的硬件可采用普通的PC機來實現,其接口滿足環境仿真的需要。
(4)各環境仿真機的軟件結構設置應盡量反映真實環境的情況。在設計中綜合考慮了系統的安全處理,采取相應的安全措施,使得整個系統滿足高安全性的要求。






評論