基于DSP的磁存儲設備抗沖擊技術控制系統

3.1 控制算法
經過深入研究和大量的分析、計算,得出該系統 的機電動力學模型如下:
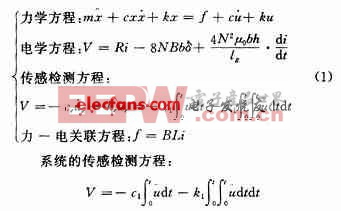
其中:為基礎振動加速度;c1,k1分別為與基礎振動相關的二次積分和一次積分系數。
設u為的電荷放大信號,根據控制要求,該系統主要利用DSP完成以下運算:
并采用均值補償法對積分結果進行修正,實現數字系統的控制。將上式離散化則生成:
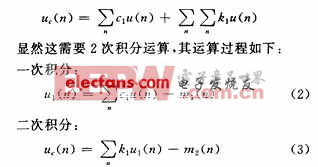
其中:m1(n),m2(n)分別是一、二次積分運算的均值。
3.2 系統軟件設計與實現
系統頭文件(擴展名為.h)的主要功能就是將DSP內部的各個特殊功能寄存器的名稱與其默認地址相對應。在匯編語言的執行過程中DSP指針會直接按寄存器名去訪問在頭文件中規定過的地址。命令文件(擴展名為.cmd)實際上是DSP的資源配置文件,在PAGE0頁(程序空間)他定義了各程序模塊的起始地址和空間長度,對片內、外各程序段、中斷矢量表的定義等;在PAGE1頁(數據空間)他定義了各數據模塊的起始地址和空間長度,如對各種參數、片內、外 66數據區的定義等。此外,應注意遵守DSP實際存儲器及存儲空間的約定。
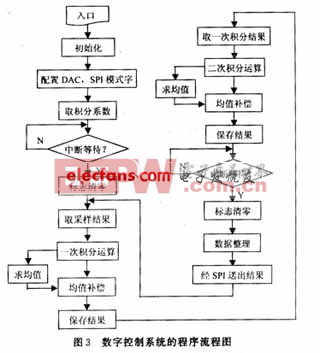
由于該系統主要是通過DSP的ADC模塊和SPI模塊與其外圍器件通信,所以在軟件設計中需要對他們的工作模式進行配置[1]。對于片內ADC的工作模式:首先應該確定ADC的啟動模式,然后使ADC達到10 kHz的采樣率。為了保證準確的采樣率,通過DSP內部計數器計數產生中斷作為ADC的啟動方式。由于TMS320F243的機器指令周期為50 ns,所以在兩次采樣時間間隔內至多可以運行約2 000個指令周期,否則就不能完成實時運算。對于SPI模塊:首先設定其通信方式為主模式,使數據按時序從SPISIMO管腳移出;然后設定每次傳輸串行數據的位數、時鐘信號方式、傳輸速率等。由于DSP片外D/A器件為12 b,而DSP的數據總線位16 b,所以必須將最后的運算結果進行相應調整后再由SPI送出。
另外,DSP內部的A/D由數值0~1 023(十進制數)來分別對應0~5 V的輸入電壓信號,所以應由值511來表示零均值點,這一點在均值補償時要特別注意。系統程序流程圖如圖3所示。
4 結 語
采用DSP直接實現機電控制是近年才發展起來的一項技術,他比傳統控制方法具有鮮明優點。實驗表明,以DSP為核心的數字控制系統可以實現實時控制,而且低頻段的相位誤差非常小,同時又可以兼顧較高頻段,適用范圍大。此外,他穩定性好、精度高,并易于實現復雜模型的控制。










評論