基于dsPIC30F3010的無刷直流電動機控制系統設計

1.3 逆變及其驅動電路的設計
逆變及驅動電路如圖3所示。主電路采用三相橋式逆變電路,由控制部分產生六路的PWM脈沖,分別送到三片IR2101的2、3管腳,經IR21 01內部處理產生兩個驅動信號驅動一個橋臂的兩個功率MOS管。C15是自舉電容,為上橋臂功率管驅動的懸浮電源存儲能量,D1的作用防止上橋臂導通時的直流母線電壓到IR2101的電源上而使器件損壞,因此應有足夠的反向耐壓,當然由于D1與C15串聯,為了滿足主電路功率管開關頻率的要求,D1應選快速恢復二極管,而且自舉電容容量取決于被驅動功率器件的開關頻率、占空比以及充電回路電阻,必須保證電容充電到足夠的電壓。在本電路中,自舉電容選的是2.2μF的電解電容。R30、R31、R32和R33作為限流電阻,防止驅動信號電流過大,損壞器件。本文引用地址:http://www.104case.com/article/149577.htm
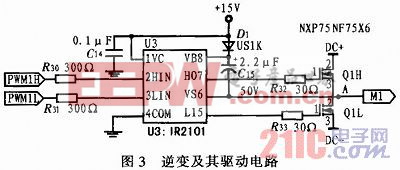
圖3中僅為聯接電動機A相繞組橋臂的驅動電路。同理,聯接另外兩相繞組的橋臂驅動電路類似。
1.4 反電動勢檢測電路的設計
無刷直流電動機穩態運行時,忽略電機電樞反應,通過檢測關斷相反電動勢的過零點來獲得永磁轉子的關鍵位置信號,從而可以控制繞組電流的切換,實現電機的運轉。
由無刷直流電機結構知,反電動勢過零點與轉子位置有對應關系,通過對定子繞組上反電動勢的檢測得到過零點,就可以得到轉子位置信息。在PWM導通期間,懸空繞組的端電壓等于反電勢與1/2電源電壓的疊加,檢測處于不通電相繞組的端電壓,其值等于電源電壓的一半時為反電動勢過零點信號。如果能夠準確地檢測到反電勢的過零點信號,即可判斷出轉子的位置,經過π/6電弧度延時處理后,可確定出換相時刻,再根據功率管的導通順序觸發相應的功率管以實現無刷直流電機的換相,保證電機按固定的方向連續旋轉。
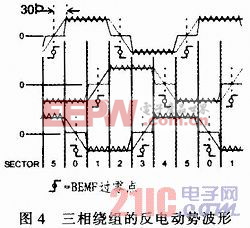
假設速度大于零,則每個電周期中某相的BEMF為零的位置只有兩個,如圖4所示,通過過零點時BEMF的斜率來區分這些位置。每一段對應電周期中的一個60°部分(共有6個相等的60°部分)。換相發生在每一段的邊界處,因此需要檢測段的邊界。BEMF過零點和需要換相的位置之間有30°的偏移,必須對其進行補償,以確保電機平穩高效運轉。













評論