基于DSP無刷直流電動機控制系統的研究

3 系統軟件設計
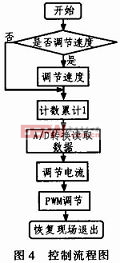
電路中采用DSPTMS320F2812來控制有位置傳感器無刷直流電動機的調速控制系統。系統CPU時鐘頻率采用20 MHz,并且應用PWM頻率為20 kHz。通過定時器至周期匹配事件啟動ADC轉換,使每個PWM周期都對電流進行一次采樣,并在A/D轉換中斷處理程序中對電流進行調節,來控制PWM輸出。轉子每轉過600機械角就觸發一次捕捉中斷,進行換相操作和速度計算。圖4為控制流程圖。本文引用地址:http://www.104case.com/article/149573.htm
在電流的檢測中可以使用旁路電阻來檢測相電流。將該電阻放于三相全控功率變換電路的下端功率橋臂與地之間;電阻值的大小可以根據需要而定,一般應該使它可以起到一個功率變換電路的過電流保護作用。電阻上的電壓首先經過放大,再送于TMS320F2812上的A/D轉換通道,得到合適的電流信號。在A/D轉換結束的時候,向CPU發出一個中斷請求信號,等待CPU對該電流信號的處理。根據電流誤差,選擇采用PID控制器還是模糊控制器,從而實現對PWM脈沖的占空比調節。
上位機即PC機,編程軟件可以采用VC++。通過程序的編寫可以實現人機友好界面,方便操作人員的使用并且能保證系統高效穩定運行。上位機可實現:
1)電動機速度的顯示;
2)電流、速度值的輸入;
3)實時、動態、直觀的顯示各參數的變化。
4)可以顯示報警畫面:當系統出現故障時,工作人員可以通過畫面直觀的看到報警信號的工號、報警類型、報警時間和當前值,點擊報警項就會切換到報警工號對應的操作界面,工作人員可進行相應的修改,當修改結束后報警可以通過復位鍵進行復位。
5)歷史報告畫面:可以查詢操作人員的操作記錄和操作的詳細時間,包括系統的啟停、各參數修改前和修改后的值等。
6)數據的保存與打印。
4 結論
本文采用DSP TMS320F2812為核心處理器,并且控制算法上采用模糊PID控制算法來實現電動機速度的調節,實現了對電動機運行的精確控制。在整體控制上采用分布式控制,更加方便了用戶對電動機的控制,也使得電動機得以精確運行。











評論