軍用嵌入式仿真技術的體系結構研究

2.5 硬件系統效果輸出組件
效果輸出組件是嵌入式仿真應用系統區別于其他嵌入式應用系統之處。仿真系統產生的效果。效果輸出組件包括硬件和軟件,其硬件即為嵌入式仿真技術基本理論體系中的物理效應設備,軟件為基礎軟件和模擬仿真系統在本地的分支或子程序。效果輸出組件受模擬仿真系統控制,以模擬仿真系統提供的順態狀態或動作為觸發。
3 軍用嵌入式仿真應用系統軟件結構
3.1 應用系統軟件基本結構
嵌入式仿真應用系統的軟件系統是其理論體系中軟件體系的具體化和產品化,是嵌入式仿真實現其功能的指揮和指導。完整的嵌入式仿真應用系統軟件結構應如圖3所示。本文引用地址:http://www.104case.com/article/149453.htm
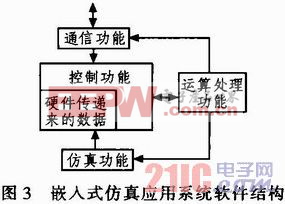
3.2 軟件系統仿真功能
虛擬環境通常指實裝或想定的環境,仿真過程是順序結構,采用數據查詢方法。這種結構是“給出環境——等待用戶動作——作出反饋”,適合離散仿真。嵌入式系統由于受硬件資源限制,比較適合采用這種觸發式軟件。因此虛擬環境仿真的嵌入式化就是軟件的精簡化。
虛擬狀態通常指過程進行到一定程度時系統所處的狀態。這些信息往往沒有經驗準備,在真實情況下即根據各種影響連續變化,且后一狀態由前一狀態和當時動作共同決定,因此需要這些量的變化模型,針對它們的仿真屬于連續仿真。這種仿真是循環結構,即實時查詢用戶是否有動作,將動作數據引入算法計算。這種仿真模式占用資源多,進行嵌入式化時必須增加資源釋放功能。
3.3 軟件系統運算處理功能
處理功能包括環境狀態處理和圖像處理。嵌入式仿真軟件對環境狀態的處理即對采集的物理量的處理。處理量大,加之嵌入式硬件資源限制,因此仿真軟件的處理功能采用優化算法,如插值法、FFT等。圖像處理是嵌入式仿真軟件必備功能,因為視覺仿真是最基本的仿真。圖像處理內容包括自然變化、用戶動作效果、虛擬狀態反饋等,需要占用大量資源,嵌入式仿真系統必須考慮到資源限制。采用二維和三維交叉結構,在不需要三維效果時進行二維處理,節省資源。處理位置上采用本地處理和遠程處理甚至云處理。
3.4 軟件系統控制功能
控制功能是仿真軟件通過嵌入式處理器協調系統運行的能力。實現控制功能的程序屬于基本軟件系統中一部分,采集仿真過程的中斷,決定是否響應,與系統本身直接相關。其控制領域包括系統資源分配、硬件動作、物理效應輸出等。
3.5 軟件系統通信功能
軟件的通信功能與硬件的通信模塊相結合工作,完成系統通信工作。實現通信功能的程序必須具備如下過程:有接口驅動,調用通信接口;合適的編解碼算法,信息準備;加密算法,對編碼加密;完整的通信協議,預留充足的字段;加密后編碼,開始通信。以上是發送結構,接收結構與之相反。
4 結束語
嵌入式仿真技術是將仿真技術小型化、可編程化和模塊化后以嵌入式系統的形式嵌入實際系統的一種技術。嵌入式仿真技術的體系結構復雜,綜合了多學科技術,以仿真技術為核心,以嵌入式技術為保障,互相融合、交互組織,形成一個完整的體系結構。充分掌握其體系結構可指導嵌入式仿真技術的研發和應用。相應級別的軍事裝備研發、訓練和行動推演都可依靠嵌入式仿真技術提高效果,減少資源消耗,深
入了解軍用嵌入式仿真技術體系結構具有重要的現實意義。



評論