嵌入式組合控制直線一級倒立擺系統

摘要:倒立擺系統廣泛應用于對各種控制理論和控制策略的正確性和有效性的檢驗。針對固高公司直線一級倒立擺系統,提出一種嵌入式組合控制直線一級倒立擺系統。在線仿真實驗表明,該系統達到了自動、安全的效果。分析系統響應曲線可知,嵌入式組合的控制算法正確、有效。
關鍵詞:倒立擺;嵌入式組合式控制器;在線仿真;組合控制算法
0 引言
小車倒立擺控制能有效反映控制中的許多關鍵問題,如鎮定問題、非線性問題、魯棒性問題、隨動問題及跟蹤問題,因此成為學習自動控制理論,研究自動控制算法較為合適的實驗對象之一。同時,它還具有工程應用背景,為理論到實踐的轉化提供了橋梁。因此,對倒立擺系統的研究在理論上和方法論上均具有深遠意義。
本文針對本科自動控制原理課程設計中倒立擺擺桿偏角控制器的在線仿真存在:手扶擺桿起擺不安全,單變量擺桿角度控制器無法同時控制小車的位置,實驗觀測不便等問題,提出并設計了基于固高公司起擺控制、最優小車位置控制、嵌入學生擺桿偏角控制的組合式控制系統。在線仿真實驗表明,組合式控制系統對直線一級倒立擺的控制有效,能滿足本科自動控制原理課程沒計及實驗的安全、自動、直觀、迅捷、可靠的要求。
1 系統建模
小車直線一級倒立擺系統的控制目標是擺桿偏角最大不超過±5°,小車在軌道中間位置左右偏移不超過±10 cm,以達到一種動態的平衡。
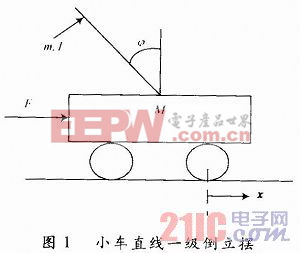
小車直線一級倒立擺實驗系統如圖1所示。對小車和擺桿做受力分析,根據牛頓運動定律,可得小車直線一級倒立擺動力學模型如式(1)所示。

式中:M為小車質量,m為擺桿質量;b為小車摩擦系數;l為擺桿長;I為擺桿轉動慣量;θ為擺桿偏角;x為小車位移;F為小車受力。
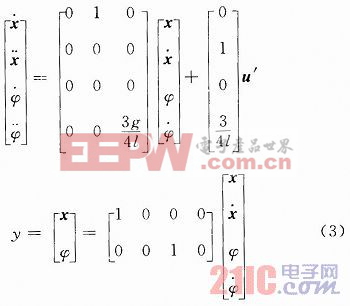
由于θ=π+φ,且φ≤1(換算成弧度比較),u代表被控對象的輸入力F,則對式(1)進行線性化處理,可得式(2),如下:

對質量均勻擺桿,取![]() ,由線性系統理論得系統的狀態空間如式(3)所示:
,由線性系統理論得系統的狀態空間如式(3)所示:








評論