基于ARM的嵌入式多路信號數據采集系統

GPRS無線終端嵌入了TCP/IP協議和UDP協議(用戶可選),本系統采用TCP/IP協議,實際上GPRSDTU上實現的協議棧是TCP/IPOverPPP。
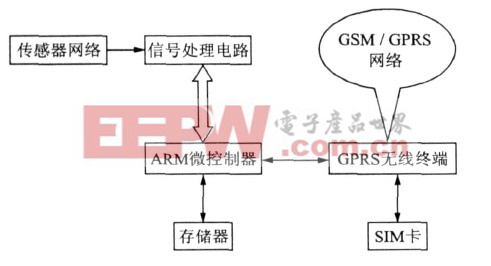
圖1 GRPS無線數據采集終端
2 硬件組成
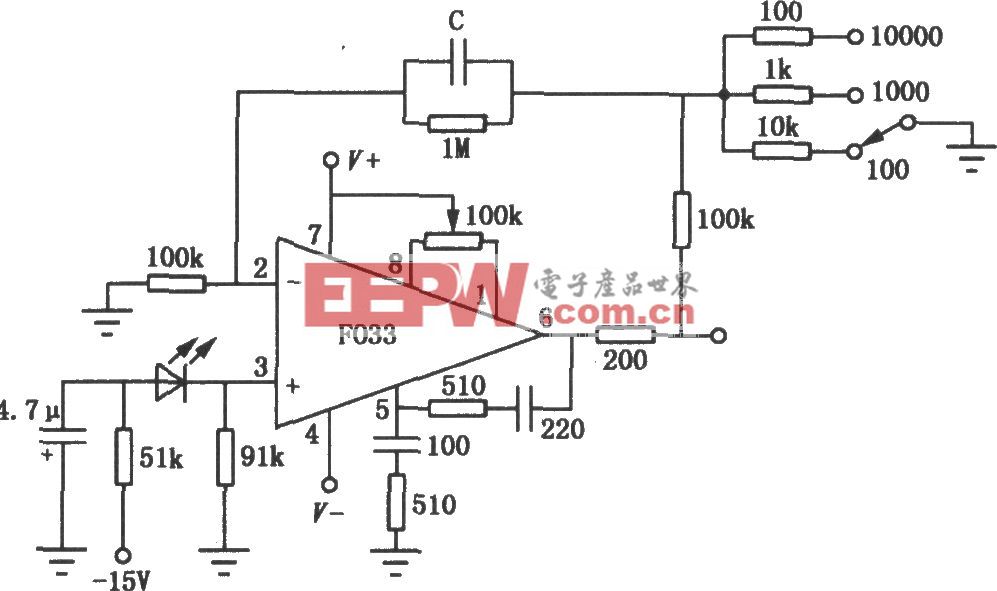
2.1 傳感器及放大器
理論上,該系統可以同時進行16路數據的采集,但在實際的調試中,只選用了2路來做模擬。
一路選用溫度傳感器,表面/液體熱電偶NR281530,獲取實時現場的溫度,另一路采用壓力傳感器,PPM241BY油井專用型壓力傳感器,此系統在油田油井中具有較好應用。
在前端信號處理單元,由于各種傳感器的輸出參數不同,輸出信號不僅電平低、內阻高,而且有共模電壓以及現場惡劣環境的影響,因此,在選用放大芯片時要綜合考慮以上因素。選取常用的MCP6S2X可編程增益放大器對原始信號進行放大,OP07CP做后續濾波芯片。
2.2 微處理器
微處理器是系統工作的核心,其性能的好壞直接決定了數據采集系統性能的優劣。基于本采集系統對數據實時性和精度的要求,以及易操作性方面的考慮,選擇32位的ARM7系列處理器,它具有以下特點:
·體積小、低功耗、低成本、高性能;
·支持Thumb(16位)/ARM(32位)雙指令,能很好兼容8位/16位器件;
·大量使用寄存器,指令執行速度快;
·指令長度固定;
·尋址方式靈活簡單,執行效率高
本系統采用PHILIPS公司的單片32位微控制器LPC2134,它是基于一個支持實時仿真和跟蹤的16/32位ARM7TDMI2STMCPU,含有128KB的FLASH,該存儲器用作代碼和數據的存儲。
LPC2134擁有兩個異步串行口UART0和UART1,本系統中將UART0與GPRS終端相連,實現數據傳輸。它采用16字節收發FIFO,內置波特率發生器,包含使能實現軟件控制的機制。
硬件SPI接口是一個同步、全雙工串行接口,最大數據位速率為時鐘速率的1/8,可配置為主機或從機。本系統中SPI接口作為主機,根據不同的中斷,控制多個從機,包括可編程增益放大器MCP6S2X,使用SPI總線訪問SD卡,以及控制開發板上的數碼管顯示。
A/D轉換器是2個8路10位逼近式模/數轉換器,測量范圍是0~313V,10位轉換時間大于或等于2144μS,一個或多個Burst轉換模式。
2.3 GPRS終端
GPRS終端選用的是南京傲屹電子有限公司的AYG285C,它是采用GPRS模塊專為工業集成設計的,在溫度范圍、震動、電磁兼容性和接口多樣性等方面均采用特殊設計,保證了惡劣環境下的工作穩定性,基于GPRS公網的數據傳輸具有通信范圍廣,傳輸穩定可靠等特點。通過按鍵可以進行模塊參數設置或者進行網絡數據通信,串口波特率在300~115200bps可調,校驗位可選:無校驗,奇校驗,偶校驗。支持協議PPP、IP、TCP、UDP、DNS、PING的客戶端功能。另外,電源、工作狀態有LED指示,方便現場查看MODEM運行情況。
3 系統軟件實現
3.1 μC/OS2Ⅱ嵌入式操作系統
當需要進行多任務處理和調度時,一個嵌入式實時操作系統就必不可少。為此系統中采用源碼公開的μC/OS2Ⅱ操作系統,它具有執行效率高、占用空間小、實時性能優良以及可擴展性強等特點,最小內核可編譯至2K字節。
μC/OS2Ⅱ的移植需要滿足以下要求:
·處理器的C編譯器可以產生可重入代碼;
·可以使用C調用進入和退出臨界區代碼;
·處理器必須支持硬件中斷,并且需要一個定時中斷源;
·處理器需要能夠容納一定數據的硬件堆棧;
·處理器需要有能夠在CPU寄存器與內核和堆棧交換數據的指令。
本系統使用的LPC2134ARM7處理器滿足以上所有條件,因此可以對其進行移植。根據μC/OS2Ⅱ的要求,移植μC/OS2Ⅱ到一個LPC2134ARM7體系結構上需要提供2個或3個文件:OSCPU.
H(C語言頭文件)、OS-CPU-C.C(C程序源文件)及OS-CPU-A.ASM(匯編程序源文件)。
數據采集任務中,采用C語言進行編程,但對于系統的初始化,仍然采用匯編來制作啟動代碼,它可以實現向量表定義、堆棧初始化、系統變量的初始化、中斷系統初始化、I/O初始化、外圍初始化、地址映射等操作。
芯片復位后,系統初始化流程如圖2所示。
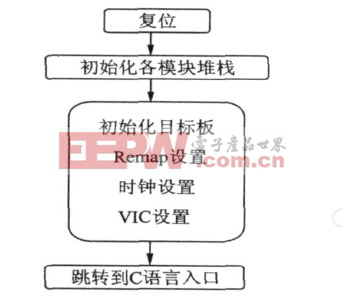
圖2 系統初始化流程圖
3.2 接口程序及SD卡驅動的實現
在實時內核下,接口程序讀取A/D采樣數據的方法通常有三種:程序延時法、ADC轉換完畢時產生中斷法和程序循環等待的方法。其中循環等待的方法CPU開銷小,不需要中斷服務,比較適合嵌入式系統中采用。
循環等待A/D讀取數據的偽代碼如下:

之間通過串口相連,采集數據先通過開發板串口UART0發送到無線數據終端AYG285C的緩沖區,然后緩沖區將數據打成一個個數據包,通過GPRS網絡發送到遠程數據處理中心。因此,在μC/OS2Ⅱ下LPC2134的UART底層接口驅動顯得尤為重要。
UART0初始化函數片斷如下:

在本系統中,串口通信采用8位數據位,1位停止位,奇校驗,無流控制。在實際使用中為接收數據穩定波特率設置為9600bps效果較好。在測試系統中,測量到的數據范圍為10-6~101,有效數字為4位,所以在發送數據時采用每幀數據由3個字節組成,第1個字節為數據指數部分,高四位為0,低四位中的第四位表示指數符號,0表示正數,1表示負數;其余三位表示指數的數值部分。
后續兩個字節為數據底數部分,采用壓縮的BCD碼編碼方式,高位在前,低位在后,即一個字節表示兩位十進制數,則兩個字節表示四位十進制數。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)






評論