基于ARM的家用智能垃圾桶設(shè)計(jì)

摘要 以ARM11 S3C6410為核心設(shè)計(jì)了一種家用智能垃圾桶,用拾音器作為聲音傳感器,采用延時(shí)估計(jì)法實(shí)現(xiàn)聲源方位的實(shí)時(shí)檢測,從而實(shí)現(xiàn)語音控制垃圾桶的運(yùn)動(dòng);采用紅外傳感器實(shí)現(xiàn)垃圾桶行進(jìn)的蔽障功能;同時(shí),采用語音識別技術(shù)實(shí)現(xiàn)用戶對垃圾桶的前、后、左、右行駛或開啟、關(guān)閉垃圾桶蓋等各種語音指示的識別。從而實(shí)現(xiàn)垃圾桶的智能化與人性化,給生活帶來便利。
關(guān)鍵詞 S3C6410;聲源定位;語音識別;避障
隨著人們生活水品的不斷提高,在人們購買各種家具或家電時(shí)越來越重視其智能化和人性化。人們在生活中產(chǎn)生的生活垃圾都需用垃圾桶放置,考慮到老人、孕婦或者殘疾人,放置垃圾時(shí)存在的不便、費(fèi)時(shí)、費(fèi)力等問題。設(shè)計(jì)針對這些問題,提出了具有語音識別功能的智能垃圾桶設(shè)計(jì)方案,當(dāng)用戶想要扔垃圾時(shí),只要一聲令下,垃圾桶就會快速準(zhǔn)確地來到你身邊。
1 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)硬件包括垃圾桶車體機(jī)械結(jié)構(gòu)和硬件控制電路兩個(gè)部分。其中車體機(jī)械結(jié)構(gòu)為一部三輪小車車體,能按照在不同地點(diǎn)處用戶發(fā)出的聲音指令,自動(dòng)行駛到用戶所在地。系統(tǒng)硬件電路總體結(jié)構(gòu)框圖如圖1所示,包括電源模塊、ARM最小系統(tǒng)、聲源定位模塊、語音識別模塊、避障模塊和電機(jī)驅(qū)動(dòng)模塊。

工作原理:首先通過語音識別模塊識別出用戶的呼叫命令,同時(shí)通過聲源定位模塊判斷用戶所處位置,再通過ARM產(chǎn)生驅(qū)動(dòng)電機(jī)的PWM信號,利用電機(jī)驅(qū)動(dòng)模塊驅(qū)動(dòng)垃圾桶向聲源方向行駛,并在行進(jìn)過程中,利用避障模塊自行避開障礙物。同時(shí),該設(shè)計(jì)還支持用戶對垃圾桶前、后、左、右行駛或打開、關(guān)閉垃圾桶蓋等語音控制。
1.1 電源模塊
系統(tǒng)所有模塊和控制器都需要+5 V的工作電壓,采用鋰電池進(jìn)行供電,并用LM2576S-5穩(wěn)壓芯片將電壓穩(wěn)定在+5 V,然后通過穩(wěn)壓源LM11 17-33和LM1117-18為S3C6410芯片3.3 V和1.8 V電壓。
其余語音芯片UDA1341TS、拾音器的5 V供電、紅外避障、直流電動(dòng)機(jī)均為+5 V供電。
1.2 聲源定位模塊
聲源定位模塊主要包括拾音器構(gòu)成的麥克風(fēng)陣列和信號處理單元,如圖2所示。
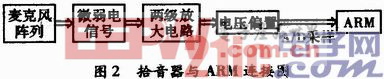
系統(tǒng)中麥克風(fēng)陣列選用2個(gè)拾音器來實(shí)現(xiàn),其監(jiān)聽范圍為30~50 m2。由于拾音器所拾取的聲音信號太小,易受環(huán)境噪聲影響,因此有必要對聲音信號進(jìn)行預(yù)處理,通過信號調(diào)理單元的處理,使其能夠滿足系統(tǒng)要求。為滿足拾音器所得到的微弱電信號進(jìn)行放大,系統(tǒng)采取兩級放大電路。又由于A/D模塊不能采集負(fù)電壓信號,因此需要對放大后的電信號進(jìn)行偏置,使其不出現(xiàn)負(fù)電壓,便于ARM采樣,使其輸出的誤差更小。
1.3 語音識別模塊
設(shè)計(jì)采用Philips公司UDA1341TS專用的語音處理芯片,能對語音實(shí)現(xiàn)放大、濾波、采樣、A/D或D/A轉(zhuǎn)換及進(jìn)行數(shù)字語音處理功能,并且支持璐總線數(shù)據(jù)格式,與ARM芯片S3C6410內(nèi)置IIS總線接口配合使用。ARM芯片上內(nèi)置的IIS接口不但能夠讀取IIS總線上的數(shù)據(jù),為FIFO數(shù)據(jù)提供DMA的傳輸模式,而且可以同時(shí)傳輸和接收數(shù)據(jù)。UDA1341TS對所采集的語音信號進(jìn)行采集和編碼,由DTW模型算法進(jìn)行模板訓(xùn)練,并將訓(xùn)練結(jié)果存儲在Flash中以便于在語音信號識別階段讀取模板。在語音信號識別階段,將輸入的語音信號經(jīng)過音頻數(shù)字信號編譯碼器UDA1341 TS處理后,通知S3C6410嵌入式Linux操作系統(tǒng),與保存在Flash中的參考樣本進(jìn)行對比,找出最佳的聲音識別效果,然后由嵌入式Linux操作系統(tǒng)中的系統(tǒng)調(diào)用函數(shù)控制S3C6410的I/O口,指揮垃圾桶的運(yùn)動(dòng)。
1.4 電機(jī)驅(qū)動(dòng)模塊
電機(jī)驅(qū)動(dòng)模塊根據(jù)ARM控制器輸出的控制信號驅(qū)動(dòng)電機(jī)的運(yùn)行。電機(jī)的驅(qū)動(dòng)電路采用H橋驅(qū)動(dòng)電路,如圖3所示。
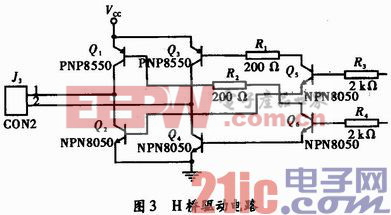
Q1、Q2、Q3、Q4這4個(gè)三極管組成4個(gè)橋臂,Q1和Q4組成一組,Q2和Q3組成一組,Q5控制Q2、Q3的導(dǎo)通與關(guān)斷,Q6控制Q1和Q4的導(dǎo)通與關(guān)斷,而Q5、Q6由S3C6410的IO口來控制,這樣就可以通過IO輸出的高低電平,控制4個(gè)橋臂的導(dǎo)通與關(guān)斷控制電機(jī)的運(yùn)行狀態(tài),使之正轉(zhuǎn)反轉(zhuǎn)或者停轉(zhuǎn),進(jìn)而控制垃圾桶的行駛。為避免用分立元件使電路板過于復(fù)雜,在設(shè)計(jì)中使用H橋驅(qū)動(dòng)L298N芯片。

手機(jī)電池相關(guān)文章:手機(jī)電池修復(fù)










評論