基于嵌入式車載安全預警系統設計

3.2 μC/OS-Ⅱ的任務規劃
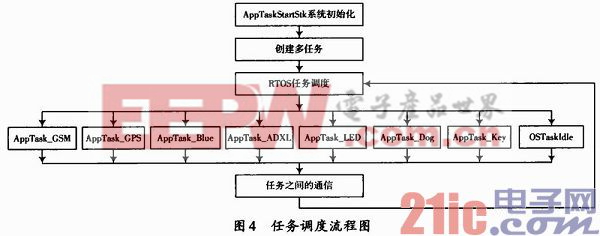
操作系統按照功能模塊劃分為多個任務,并根據各個任務實時性的要求設置相應的運行優先級。分別是:振和內核時鐘的定義和初始化,對功能I/O端口的功能定義,初始化中斷向量表和堆棧以及各模塊的全局變量和數據結構,完成系統的初始化后永久掛起;AppTask_GSM負責與TC35模塊有關的控制功能如模塊的初始化、短信的發送;AppTask_GPS負責對LEA-5S模塊的數據讀取和解析;AppTask_Blue負責藍牙語音模塊的控制功能,包括接聽、拒接、回撥、結束通話等功能;AppTask_ADXL負責ADXL345模塊的數據讀取和解析;AppTask_IED為工作狀態指示;AppTask_Key為按鍵控制;監控系統穩定的看門狗任務AppTask_Dog;以及系統運行自帶的空閑任務OSTaskldle。
系統整體的任務調度流程圖如圖4所示。本文引用地址:http://www.104case.com/article/148038.htm
4 測試
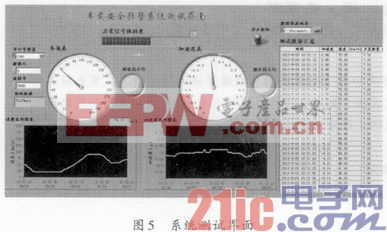
對于該車載系統下面給出基于LabVIEW的GPS實車行駛速度測試,測試界面如圖5所示。
5 結語
本文詳細描述了基于STM32車載安全預警系統硬件和軟件的設計方案。對整個車載系統進行了實車測試,測試結果表明整個系統符合預期的目標,可以實現對車輛的定位、超時、超速、加速度超值、并通過GSM將行車異常狀態參數和定位信息發送至遠程監控中心,移植的μC /OS-Ⅱ使得該系統具有良好的穩定性和實時性,能滿足現代車輛安全遠程監管的功能需求。








評論