構建基于PXI電子液壓制動系統EHB駕駛員在回路混合仿真實驗平臺

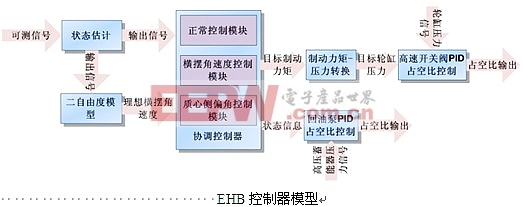
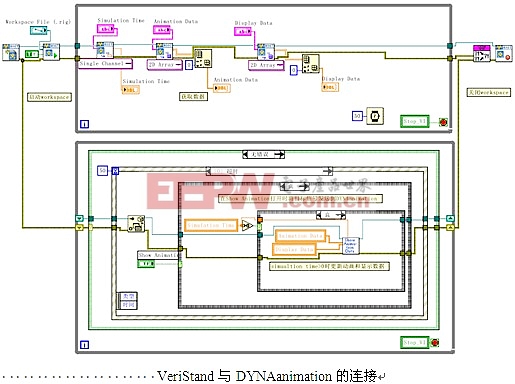
EHB控制器模型在Simulink/Stateflow環境下建模,與上述DYNAware中模型實現無縫集成。模型采用固定步長常微分方程求解器,通過Real-Time Workshop轉化為VeriStand支持的dll動態鏈接庫文件。
本文引用地址:http://www.104case.com/article/143529.htm4、配置VeriStand
在System Explorer Window中導入模型文件,對Primary Control Loop的實時仿真速度進行調整,設置周期為100μsec,則Model Execution Loop的周期為1ms,滿足車輛實時仿真的需要。通過分配處理器資源,Veristand能充分發揮雙核處理器的并行處理性能,提高實時運行速度。橫擺角速度是判斷汽車失穩的重要標志,當理想橫擺角速度與實際橫擺角速度之差超過上下門限值時,通過報警設置以報警音的方式提示駕駛員。
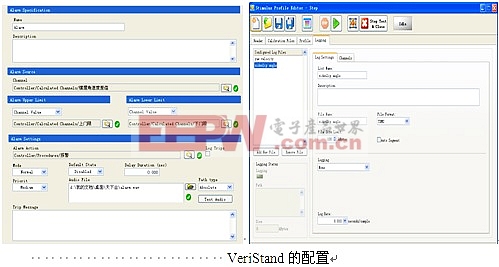
通過菜單界面完成對NI-CAN、NI-DAQ的通道設置,大大減小了程序的開發工作量,提高了開發效率。在Stimulus Profile Editor中設置Logging file,可以對橫擺角速度、質心側偏角、輪缸壓力等進行保存。TDMS文件格式讀取快速,作為一種測試測量領域的通用數據文件格式,非常適合車輛狀態參數的保存。












評論