基于CCD的火災探測智能車設計

摘要:本文以建筑環(huán)境檢測為研究對象,設計了以STC12C5A60S2單片機為系統(tǒng)控制處理器的對建筑內(nèi)環(huán)境進行自主循環(huán)檢測的智能模型車,研究了傳感器、探測器在建筑環(huán)境檢測中的應用,實現(xiàn)了智能車的自主調(diào)速、避障的功能以及建筑環(huán)境的火災情況檢測、顯示、報警,工作人員通過CCD傳感器采集到的視頻圖像實時監(jiān)測檢測情況并進行智能車自動/手動選擇以及相應情況的處理。
本文引用地址:http://www.104case.com/article/141877.htm引言
本次設計的智能模型車通過溫濕度傳感器和感煙探測器檢測建筑物空間內(nèi)是否存在火災隱情,報警時工作人員通過CCD傳感器采集到的視頻圖像確認火災是否發(fā)生,確認火災情況后,定位智能車位置并手動控制智能車離開事故現(xiàn)場,然后進行卷簾門開啟的命令。智能車靈活方便,而且循環(huán)檢測,提高火災檢測的效率性、火災報警的實時性以及火災位置檢測的精確性。
系統(tǒng)總體設計
總體功能設計
本次設計的智能車通過紅外傳感器和超聲波傳感器檢測建筑物內(nèi)環(huán)境的信息,控制器做出合理、快速、準確的決策,使得智能車能夠自主地避障和進行新路徑的選擇,實現(xiàn)智能車在建筑物內(nèi)自主地對每個房間進行逐一排查,通過溫濕度傳感器對建筑物空間的溫度和濕度進行檢測,然后與預置的參數(shù)臨界值進行比較,并與聲光報警裝置配合,同時結合感煙探測器的檢測結果,從而做出報警/繼續(xù)檢測的判斷,并將采集到的數(shù)據(jù)以及CCD傳感器采集的視頻圖像實時傳送給控制中心。
總體方案設計
根據(jù)應用環(huán)境對智能車的簡單敏捷型的要求,且硬件系統(tǒng)是智能車成敗的關鍵,是智能車能夠安全、穩(wěn)定運行的基礎,硬件的選擇十分重要。在硬件的初步選型后確定此系統(tǒng)硬件實現(xiàn)的可行方案,確定了以STC12系列單片機為該系統(tǒng)的核心,并選擇低功耗和低成本的功能器件。圖1是該系統(tǒng)的總體結構框圖。
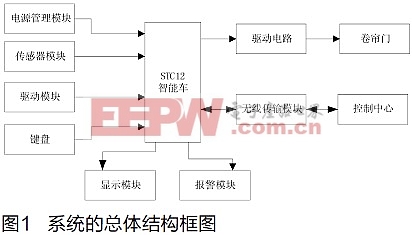
由溫濕度傳感器、感煙探測器和CCD傳感器組成的監(jiān)測部分主要檢測建筑環(huán)境的溫度和濕度,查找建筑環(huán)境的火災安全隱情,控制部分主要由驅(qū)動電路來控制卷簾門的開/關,當智能車發(fā)現(xiàn)采集到的數(shù)據(jù)超過預制的參數(shù)臨界值時,啟動報警器,發(fā)出聲光報警信號,通過無線傳輸模塊將現(xiàn)場的實時數(shù)據(jù)發(fā)送到物業(yè)中心,工作人員通過視頻圖像進行確認,情況屬實時,定位智能車位置,開啟卷簾門,并且智能車手動功能開啟,由工作人員控制離開事故現(xiàn)場,進行火災隔離。由于建筑所在區(qū)域以及季節(jié)的不同,可以通過鍵盤設置系統(tǒng)的相關參數(shù),并且檢測的各項數(shù)據(jù)都會通過液晶顯示器顯示。
系統(tǒng)主要功能模塊設計
本設計系統(tǒng)控制核心部分采用了可靠性高、功能強、靈活性以及性價比高的STC12C5A60S2單片機,同時還采用了軟/硬件的“看門狗”技術等抗干擾措施,提高系統(tǒng)的準確性。













評論