國產化衛星/MEMS組合導航模塊的設計實現

跑車實驗:沿著一小區跑車,該小區有高樓,有樹蔭,其具體的姿態角如下圖所示。
本文引用地址:http://www.104case.com/article/134653.htm
衛星/MEMS組合濾波
導航解算
由于MEMS陀螺不同于傳統高精度陀螺,其不能感測地球相對于慣性空間的旋轉速率,因而無法使用傳統的導航解算公式去實時推算速度和位置。如圖4所示,為捷聯解算算法流程。
組合濾波算法
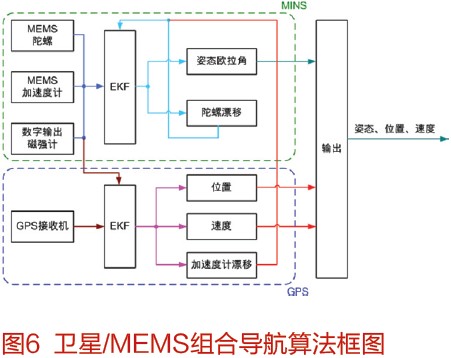
衛星/MEMS組合導航模塊實現方案如圖5所示,MEMS-SINS模塊與衛星導航模塊是彼此獨立的兩個部分,此框圖顯示了以MEMS-SINS和衛星導航接收機的速度/位置信息做差作為量測量。松耦合組合導航通常有兩種形式:開環與閉環,如圖5所示,該技術方案采用閉環形式,將卡爾曼濾波估計出的各種誤差反饋至MEMS-SINS模塊,改善系統性能[5]。
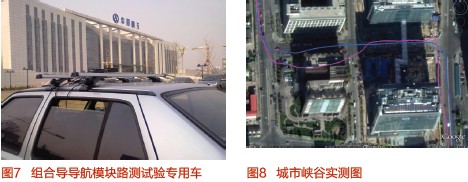
組合導航路測試驗
與傳統高精度捷聯慣性導航系統不同的是,MEMS-SINS模塊無法感測地球自轉角速率,地球的自轉角速率完全淹沒在MEMS陀螺的噪聲之中,當載體處于靜止狀態時,認為陀螺輸出角速率為0。MEMS-SINS誤差方程修正如下所示:









評論