慣性MEMS傾角測量誤差補償設計

摘要:利用ADI公司的MEMS陀螺儀ADXRS612和ADuC7026微控制器,對飛行器在垂直起降階段進行姿態傾角測量。由于該陀螺儀隨著時間的積累,會產生較大漂移,采用ADI公司的MEMS加速度計ADIS16210對傾角進行測量,并采用最小二乘擬合推算了陀螺儀漂移誤差模型,以補償陀螺儀漂移誤差,提高了飛行器垂直起降時的姿態控制精度。
本文引用地址:http://www.104case.com/article/133765.htm引言
利用慣性元件可以對運動體的姿態進行測量,慣性MEMS(微機電系統)元件是近年來新出現的慣性器件,其具有低成本、高可靠性、低功耗、尺寸小等技術優勢,只是目前精度還比較低,但這項技術的性能每年都有大幅度提高,應用領域也日益廣泛。
陀螺儀在進行運動體姿態角測量時,隨著測量時間的增加會產生漂移,使所測得的姿態角不準確。在飛行器垂直起降階段,飛行器可以看作是定基座裝置,這樣便可以用加速度計對飛行器進行等效傾角測量,并且因為加速度計漂移很小,其長時間測得的傾角也較為準確。因此,可以利用其對陀螺儀進行傾角測量的修正補償。
控制系統整體結構及傾角測量原理
飛行器垂直起降階段控制系統框圖如圖1所示,由內外雙回路控制系統實現,其中姿態角的檢測用于外角度環的控制。
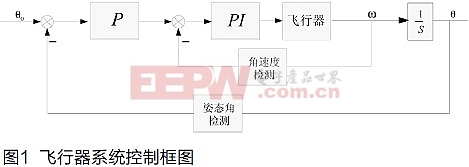
本次設計采用的MEMS慣性測量元件為ADI公司的陀螺儀ADXRS612,這是一款低成本角速率傳感器,帶有溫度補償輸出,測量范圍為±250°/s,輸出比例因素為7mV/°/s,帶寬為0.01Hz~2.5kHz可調,漂移約為6°/min,通過溫度補償算法可使漂移控制在200°/h,可用在慣性測量單元與平臺穩定系統中。
利用ADXRS612進行姿態測量,只需將其輸出對時間積分,即可得到被控對象在某一轉動方向上的傾斜角。










評論