基于小波變換的視頻應變測量系統設計與實現

測量試驗與結果
本文引用地址:http://www.104case.com/article/119035.htm試驗設備及系統軟件設計
試驗硬件:CCD——德國Basler A601f;鏡頭——Computar公司的H6Z0812鏡頭;圖像處理卡——Matrox公司的Meteor-Ⅱ/1394卡;光源——自制的LED面光源。試驗過程中采用材料試驗機進行動態拉伸試驗。所使用的材料試驗機具體參數為:力測量精度在負荷傳感器容量的0.4%~100%范圍內,精度為示值的±0.5%;位移速度精度優于±0.5﹪(空載、檢測距離大于20mm)。試驗設備如圖2所示:
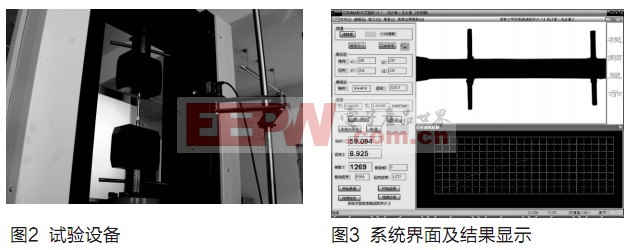
在Windows XP操作系統下,利用Visual C++高級語言編制系統軟件[6,7],實現算法操作,系統界面及顯示結果如圖3。
根據試驗數據的精密度評定方法,在試驗中,得到的測量值M由真值T與實驗誤差δ兩部分組成,即M=T±δ。真值是未知的,一般采用多次測量求算術平均值作為其真值。
采集頻率對系統算法實現的影響
視頻應變測量系統應用于動態圖像測量,因此需研究影響系統數據結果的時間因素,即分析不同采集頻率對小波變換期望亞像素算法精度的影響。
試驗條件:三角架放在試驗機上,固定攝像機,距試件大約200mm附近,具體距離根據工件圖像清晰程度調節,裝置如圖2所示,用引伸計作為標記。打開試驗機,開始試驗,動橫梁向下移動,選定橫梁移動速度約3mm/min,工件進入拉伸試驗階段,攝像機采集試驗數據,進行分析計算。具體試驗參數如下:試驗機拉伸速度3mm/min;光照度726LUX;物距192mm;測量標距50mm;光圈5;焦距14。
1、采集頻率15幀/秒
在圖4為在相機采集的數據中,把幀數換算為時間,與試驗機采集的時間相匹配作為橫坐標,縱坐標為變形值,虛線是引伸計采集數據,實線是相機采集的數據。
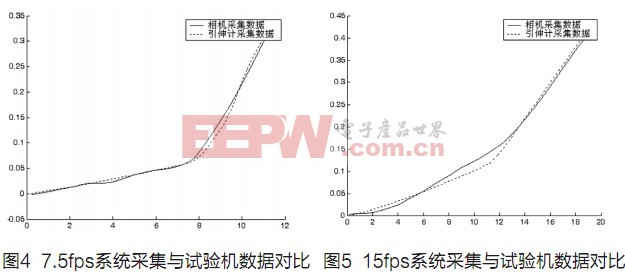
當采集頻率7.5幀/秒時,相機采集數據與引伸計采集數據的平均誤差為:
![]()
2、采集頻率15幀/秒
同上處理得出,當采集頻率15幀/秒時,相機采集數據與引伸計采集數據的平均誤差為:
![]()
3、采集頻率為30幀/秒
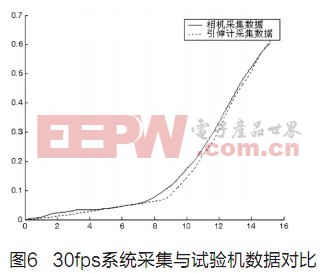
采集頻率30幀/秒時,相機采集數據與引伸計采集數據的平均誤差為:
![]()
通過對視頻應變測量系統數據結果在不同圖像采集頻率下的分析,可以得出在光照、物距、焦距等外界因素不變的條件下,隨著相機采集頻率(7.5幀/秒、15幀/秒、30幀/秒)的提高,數據誤差會隨著增大。但該系統在30幀/秒情況下,可以滿足一定的誤差要求,而不至于誤差過大,使得測量結果不精確。
結語
本文所設計的基于小波變換視頻應變測量系統,精度較高,且具有一定的實時性要求,能夠滿足實際的需要。隨著電子技術、機械科學、光學和計算機科學技術[8]的發展,應用于視頻應變測量系統的精密邊緣檢測技術,將會有長遠的發展。
參考文獻
[1]聶毓琴,孟廣偉.材料力學[M].長春:吉林科學技術出版社,2000.
[2]于起峰,陸宏偉,劉肖琳.基于圖像的精密測量與運動測量[M].北京:科學出版社,2002.
[3]張學成,楊敏華,張英杰.灰度矩邊緣精確定位法的測量應用探討[J].計算機測量與控制,2006,14(11):1446-1449.
[4]李弼程,羅建書.小波分析及其應用[M].北京:電子工業出版社,2003.
[5]丁興號.基于小波變換的亞像素邊緣檢測[J].儀表儀器學報,2005,8(26):801-804.
[6]David J,Kruglinski.Visual C++技術內幕[M].北京:清華大學出版社,1999.
[7]甄紅濤,齊曉慧.一種非均勻行采集的智能車路徑識別算法[J].電子產品世界,2010,11:27-30.
[8]蓋素麗.基于CPU的數字圖像并行處理方法[J].電子產品世界,2009,2:38-40.




評論