微機械陀螺的閉環驅動電路的設計與實現

AGC反饋回路
本文引用地址:http://www.104case.com/article/119032.htmAGC電路的基本原理是隨著輸入信號幅度的變化產生一個相應變化的直流電壓(AGC電壓),利用這一電壓去控制某種可變增益放大器的放大倍數[4]。當輸入信號幅度較大時,AGC電壓控制可變增益放大器的放大倍數減小;當輸入信號幅度較小時,AGC電壓控制可變增益放大器的放大倍數增加。我們需要將驅動檢測信號輸入AGC反饋電路,產生相應的直流電壓,將其與參考電壓比較,來控制波形信號發生器[5]。電路如圖5所示:
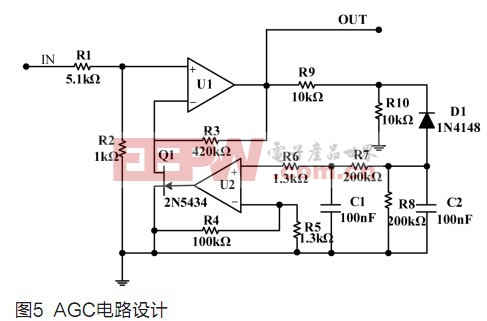
圖5中,輸入信號經電阻R1、R2分壓后送往運放U1的同相輸入端,二極管D1對運放U1的輸出信號分壓信號整流后,經過一個形濾波電路得到一個負向的AGC電壓,該電壓經運放U2放大后送往場效應管Q1的柵極。
當輸入信號的幅值較大時,相應地得到了較大的AGC電壓,運放U2輸出較大的負壓至場效應管Q1的柵極,增大了場效應管Q1的源漏極間的電阻,從而減小了運放U1的放大倍數。反之,當輸入信號的幅值較小時,AGC電壓也較小,運放U2輸出也小,場效應管Q1的源漏極間的電阻很低,使運放U1得到較大的放大倍數,從而在U1的輸出端得到幅值較大的信號。
試驗發現,當輸入信號由300mV逐漸增加到2.5V時,運放U1的輸出信號都能基本穩定在1.5V。通過調整電阻R9和R10的阻值,就能在U1的輸出端得到不同幅值的輸出信號。
結束語
本文對微機械陀螺的閉環驅動電路進行了分析和設計,實現途徑主要分為自激驅動方式和鎖相環方式。設計的閉環驅動電路可保證陀螺始終工作在諧振頻率,從而保證優異的系統性能。但是,閉環驅動需要檢測陀螺振動情況,對電路要求較高,而且電路體積大,這需要在以后的工作中改進的地方。
參考文獻:
[1]郭秀中,阮愛武.微機械梳狀驅動陀螺儀的理論分析[J].傳感器技術,1997.16(3):23
[2]王慧泉,郁發新,金仲和,等.高性能微機械陀螺接口電路研究[J].傳感技術學報,2006.8(4):1136-1139
[3]Zhang Fuxue,Wang Hongwei,Zhang Wei,et al.The Structure principle of Silicon Micro-machined Gyroscope Driven By The Rotating Carrier Proceeding of IEEE International Journal of Information Acquisition.2005 (3):11-18
[4]MARINIS T F,SOUCY J W.Vacuum Packaging of MEMS internal sensors[C].International Microelectronics and Packaging Society Conference, Boston, Massachusetts, November 18-20, 2003:386-391
[5]車錄鋒,熊斌,黃小振,等.微機械陀螺傳感器模型與接口電路的混合模擬.固體電子學研究與進展[J], 2003(4):496-499

低通濾波器相關文章:低通濾波器原理

評論