微機械陀螺的閉環驅動電路的設計與實現

C-V轉換電路
本文中研究的微機械陀螺包括驅動模態的兩個差分檢測電極和檢測模態的兩個差分檢測電極。這兩對電極敏感的都是電容的變化,C-V轉換電路主要是將微弱的電容變化量轉變成相應的電壓信號量,其特性對陀螺的驅動和檢測精度都有很大的影響,特別對硅微陀螺的檢測電路至關重要。 圖3為C-V轉換電路原理圖,載波信號V連接到差動電容的公共極板,電容的另外兩端分別接兩個電荷放大器。從圖中看,C1、C2右端為驅動檢測極板,左端為公共極板。
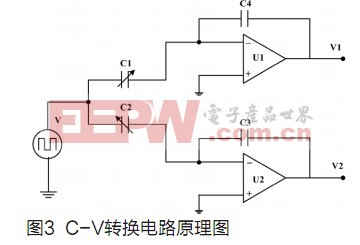
當驅動模態振動時有C1=C0+ΔC,C2=C0-ΔC其中C0 是靜止時極板間電容, 是變化電容。同時,在電路中使C3-C4=Cf。則由計算可知:
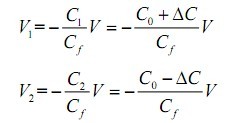
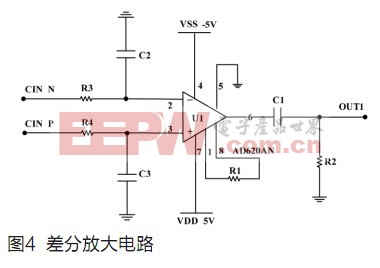
V1、V2分別接差分放大器的兩端,電路如圖4。
得到:
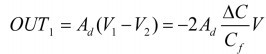
其中,是差分放大器的共模增益。
至此,驅動極板間電容變化量被轉換為電壓信號,驅動極板運動狀態被轉換為電壓輸出,完成了C-V轉換。AD620AN差分增益: ,取RG=10kΩ,可得G=5.94。這對示波器信號顯示是不夠的,所以后面還需接放大器。
,取RG=10kΩ,可得G=5.94。這對示波器信號顯示是不夠的,所以后面還需接放大器。
在該檢測電路前一級放大器中,輸入端為虛地,所以差動電容到放大器輸入端的分布電容對檢測影響很小[3]。而差分放大電路能抑制共同噪聲,并且抑制了零點漂移。

低通濾波器相關文章:低通濾波器原理

評論