基于嵌入式處理器的無人機(jī)地面控制站設(shè)計

3 軟件方案
本文引用地址:http://www.104case.com/article/117109.htm基于硬件方案,運(yùn)行定制的Windows CE操作系統(tǒng),編寫測控控制臺軟件,實(shí)現(xiàn)對無人機(jī)控測遙數(shù)據(jù)控制和處理。
3.1 WinCE的定制
過微軟提供的Platform Builder根據(jù)需要定制Windows CE操作系統(tǒng),具體步驟如下。
新建平臺:在platform Builder 平臺利用向?qū)蟿?chuàng)建一個基于CAYMAN:ARMV4I包的平臺。
添加驅(qū)動:在PB右邊的catalog窗口中選擇所要填加的驅(qū)動或應(yīng)用,包括串口驅(qū)動等。
刪除組件:刪除不需要的組件,以減小定制后的操作系統(tǒng)體積。
編譯WinCE:得到二進(jìn)制的image:“nk.bin”和“nk.nb0”。
燒寫EBOOT:利用PXA270開發(fā)系統(tǒng)JTAG加載程序加載Eboot。
下載運(yùn)行WinCE鏡像:利用Eboot通過以太網(wǎng)下載方式把nk.nb映像文件下載到PXA270平臺的的RAM空間執(zhí)行。
輸出SDK:輸出定制平臺的SDK,用于編寫在該平臺下運(yùn)行的測控應(yīng)用程序。
3.2 測控控制臺軟件
3.2.1 軟件結(jié)構(gòu)
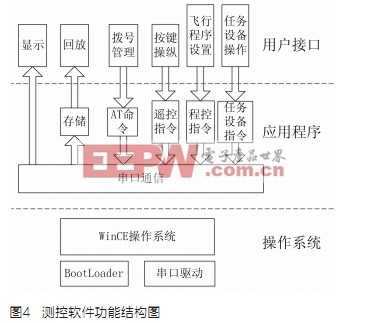
測控主程序在操作系統(tǒng)提供的支撐下,主要功能是由串口通信模塊實(shí)現(xiàn)數(shù)據(jù)收發(fā),包括完成遙控指令、程控飛行數(shù)據(jù)和任務(wù)設(shè)備控制指令的上傳,完成遙測數(shù)據(jù)及其它下行數(shù)據(jù)的接收和存儲,并向操作人員提供遙測數(shù)據(jù)顯示和回放功能、撥號管理功能、指令輸入功能等,軟件功能組成和結(jié)構(gòu)如圖4所示。
3.2.2 串口通信模塊的實(shí)現(xiàn)
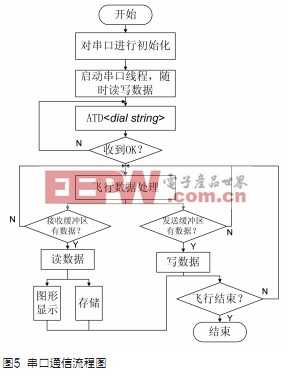
測控程序采用API函數(shù)實(shí)現(xiàn)串口通訊,通信流程如圖5所示。
3.2.3 數(shù)據(jù)處理和圖形顯示
數(shù)據(jù)處理用于對讀串口線程得到的數(shù)據(jù)進(jìn)行處理,根據(jù)與飛行控制器約定的數(shù)據(jù)格式協(xié)議,從數(shù)據(jù)串中分別取出各種飛行參數(shù)到相應(yīng)的變量中,并調(diào)用更新函數(shù)更新對應(yīng)的Edit Control的顯示內(nèi)容。
遙測數(shù)據(jù)中的俯仰角、滾轉(zhuǎn)角、航向角和高度四個參數(shù),對于無人機(jī)飛行狀態(tài)的判斷具有重要作用,為避免占用過多系統(tǒng)資源,采用屏幕繪圖動態(tài)顯示,在更新時僅對成圖的關(guān)鍵點(diǎn)進(jìn)行相應(yīng)的計算,避免屏閃。

cdma相關(guān)文章:cdma原理


評論