用感應器對BLDC電動機進行磁場定向控制

為什么選擇FOC?
本文引用地址:http://www.104case.com/article/116807.htm標量控制或六步轉換進程是根據(jù)霍爾傳感器輸入(也可不采用傳感器)控制BLDC電動機的傳統(tǒng)方法,提供了動態(tài)反饋。只有在電動機達到下一位置時,它才給一對線圈通電,整流再進入下一步。如果實施方案采用感應器,則用霍爾傳感器確定轉子位置,電動機會相應整流。標量控制的優(yōu)勢在于其非常易于實施。一些高級標量控制方法使用電動機生成的back EMF確定轉子的位置。但是,這種動態(tài)反饋不適用于周期內(nèi)負載動態(tài)變化的應用。只有FOC這樣的高級算法才能處理動態(tài)負載變化。
以下我們將介紹如何實施FOC控制算法。就本例而言,我們采用了賽普拉斯推出的PSoC 3。子系統(tǒng)分為以下幾大模塊:
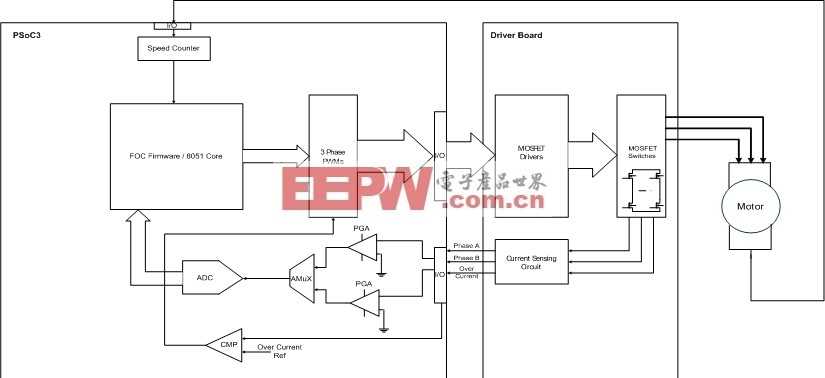
磁場定向控制算法的不同模塊(采用賽普拉斯推出的PSoC 3實施)。
1. 電流重構模塊
我們用雙分流器法重構電流。利用這種方法,我們可測量兩個分支電流,并用Kirchhoff電流定律重構第三個電流。PWM設計為中央對齊,每個FOC周期在PWM周期中央捕獲兩個電流樣本。進行采樣后,F(xiàn)OC即開始采樣的ADC轉換,并重構電流。
2. 克拉克和帕克轉換
重構電流隨后轉換為雙相定子參考,再通過克拉克和帕克轉換分別轉換為雙相轉子參考。轉換完成后,轉子參考中的電流就能調(diào)節(jié)滿足適當?shù)乃俣群团ぞ匾蟆?/p>
克拉克轉換
輸入:Ia, Ib, Ic.
輸出:Iα, Iβ
轉換:Iα = Ia
Iβ = (Ia + 2 * Ib)/√3
帕克轉換
輸入:Iα, Iβ
輸出:Id, Iq
轉換:Id = Iα cos θ + Iβ sin θ
Iq = Iα sin θ + Iβ cos θ
3. PI調(diào)節(jié)器
我們實施增益可調(diào)的一般性PI控制器和最小最大飽和,以調(diào)節(jié)雙相轉子參考電流及電動機速度。
4. 逆變帕克和克拉克轉換
調(diào)節(jié)后的輸出隨后再轉換為三相參考(PWM工作周期),進而通過逆變帕克和克拉克轉換)調(diào)節(jié)轉子速度。
逆變帕克轉換
輸入:Vd, Vq
輸出:Vα, Vβ
轉換:Vα = Vd cos θ + Vq sin θ
Vβ = Vd sin θ + Vq cos θ
逆變克拉克轉換
輸入:Vα, Vβ
輸出:Va, Vb, Vc
轉換:Va = Vα
Vb = 1/2 * Vα + 2/√3 * Vβ
Vc = 1/2 * Vα - 2/√3 * Vβ
5. SVM(空間矢量調(diào)制)
空間矢量調(diào)制技術用于生成正弦波提供給定子線圈。根據(jù)逆變克拉克轉換生成的三相參考,SVM生成的PWM比較值相位移120度。
![]()
![]()
其中:
tc, tb, ta à PWM比較寄存器值,表4.2。
T1 and T2 à 參見表1。
PWMperiod àPWM周期數(shù)。
表1. 查詢T1和T2的搜索表
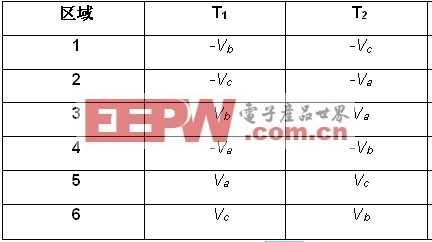
區(qū)域T1T2
1-Vb-Vc
2-Vc-Va
3VbVa
4-Va-Vb
5VaVc
6VcVb
其中:
Va, Vb and Vc à 逆變克拉克轉換輸出。
根據(jù)以下標準決定區(qū)域:
如果Va > 0,則Sector_bit_0 = 1,否則為0。
如果Vb > 0,則Sector_bit_1 = 1,否則為0。
如果Vc > 0,則Sector_bit_2 = 1,否則為0。
表2:分配PWM工作周期的搜索表

區(qū)域123456
PWM_Atbtatatctctb
PWM_Btatctbtbtatc
PWM_Ctctbtctatbta
速度和位置感應
首先,我們檢測一個霍爾傳感器輸入兩個上升或下降邊緣之間的周期來測出速度。檢測的周期實際就是一個電子周期,是電子頻率或速度逆變所得。電子速度值在每個FOC周期上累加,就計算出位置“Θ”。在本例中,F(xiàn)OC周期為200µS。我們用以下關系:
Θ = ωt
Θ à 角距為“t”秒
ω à 角速度
t à Θ計算時間間隔
位置Θ還能用編碼器輸入替代霍爾傳感器來計算。我們不用累加速度,可直接獲得位置信息。
FOC帶來了出色的高效性和節(jié)能性,利用這種控制技術驅(qū)動電動機、滿足實際需求,可大幅節(jié)約成本。此外,利用PSoC 3這種SoC的靈活性優(yōu)勢、豐富資源和小型化架構,包括硬件在內(nèi)的整個控制算法(不含驅(qū)動器板)都能在單芯片中加以實施。

電動機相關文章:電動機工作原理設計
霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理 矢量控制相關文章:矢量控制原理





評論