一種非均勻行采集的智能車路徑識別算法

摘要:提出了一種非均勻行采集的路徑識別算法。在圖像采集中,采用非均勻行采集實現了圖像畸變矯正;在圖像處理中,根據攝像頭采集時序,對圖像進行橫向濾波、閾值分割、邊緣檢測、縱向濾波和導航參數提取等。該算法合理安排程序流程,提高了圖像處理和車體控制的實時性。實驗結果表明,此方法能夠有效降低噪聲干擾和圖像畸變對參數提取的影響,提取出精確的引導線導航參數。
本文引用地址:http://www.104case.com/article/114481.htm引言
利用機器視覺,通過識別路面條帶狀引導線實現自主導航是現階段智能車常用的導航方法[1]。該方法不僅具有視覺導航信息量豐富,智能化程度高的優點,而且引導線的加入大大降低了圖像處理的數據量和技術成本,提高了智能車控制的實時性和現實應用的可行性。當前研究的熱點問題是路徑識別的準確性和實時性。
本文基于黑白攝像頭和Freescale16位單片機設計了智能車路徑識別系統,系統框圖如圖1所示。
智能車通過識別白色地板上的黑色引導線實現路徑的跟蹤。根據攝像頭按行采集的特性,首先對單行數據進行橫向濾波、檢測邊緣、提取路徑,整場圖像采集完后再對提取的路徑信息進行縱向濾波,對特殊路況進行處理,最終實現了對路徑的精確識別。實驗結果表明,文中所提出的路徑識別算法抗干擾性強、原理簡單、計算量小,能滿足路徑識別的準確性和智能車控制的實時性要求。

非均勻行圖像采集
攝像頭在拍攝圖像的時候,最理想的位置是垂直于拍攝平面,這樣才能保證圖像按原來的幾何比例重現。然而受到智能車車體結構的限制和車體控制需攝像頭有一定預瞄距離的要求[2],攝像頭一般與地平面成一定角度安裝。安裝角度的存在會造成一定的成像畸變,圖像的畸變會產生一系列問題:垂直線被拍攝成斜線導致斜率計算錯誤,遠處的彎道被壓縮導致曲率計算錯誤等等。在這種情況下,直接利用目標引導線在圖像中的相對位置制定控制策略,會造成較大的誤差,甚至使小車嚴重偏離引導線。針對此問題,本文在分析攝像頭成像模型的基礎上,提出了一種非均勻行采集的圖像畸變矯正算法。圖2為攝像頭成像示意圖[3]。
圖中,梯形區域ABCD為攝像頭視野范圍,Y軸方向為智能車前進方向。由圖可得圖像坐標系與世界坐標系的坐標轉換關系為:
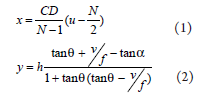
式中,N為采集圖像的總行數;α為攝像頭張角,θ為攝像頭俯仰角,f為攝像頭的焦距,h為攝像頭安裝高度。
由式(2)得到圖像行數v與世界坐標y的關系曲線如圖3所示。圖像行數與其所反映的實際距離之間是非線性關系,距離越遠,圖像中兩行間的實際距離越大,即攝像頭對遠處的路平面進行了縱向的壓縮,而且距離越遠,壓縮越嚴重。
為了消除這種畸變,令單片機非均勻地采集攝像頭輸出圖像中的行,在距離較遠處采集的行數較密,近處采集的行數較少。這種規則通過采集行數的非線性彌補了圖像行數與實際距離的非線性,實現了等空間間距的均勻采樣,從而保證了智能車控制器采集得到的圖像在縱向上與實際路平面間相對無畸變或畸變較小。
經非均勻行采集進行縱向畸變矯正后,圖像坐標系與世界坐標系之間的坐標變換公式為:
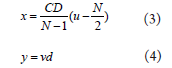
其中d為世界坐標系中兩采樣行的間隔。
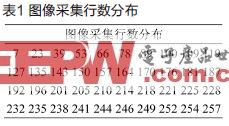
由于所用單片機的A/D轉換能力有限,且本系統的目的只在于提取出黑線中心,最終方案采集40×60分辨率的圖像。根據攝像頭的參數和公式(3)計算得到本系統非均勻行采集的行數分布如表1所示。
圖像處理
圖像處理流程
該攝像頭的場掃描頻率為50Hz,為了提高智能車控制的實時性,本系統選擇控制周期為20ms,即在一個圖像場周期內必須完成圖像采集、圖像處理、路徑識別和車體控制等一系列工作。這就需要合理規劃處理流程,同時要求各種算法簡練有效。本系統的程序流程如圖4所示,采集完一行圖像后,利用到下一采集行的空余時間處理該行數據,提取路徑。待整場圖像采集完畢,利用場消隱的時間對整場路徑進行縱向濾波,判斷路況,并對舵機和電機進行控制。



評論