儀器儀表數字圖像的識別及其應用

圖像傳感器的SDA和SCL分別為內部寄存器配置數據線和時鐘線,單片機通過P1.2、P1.3模擬I2C總線對圖像傳感器內部寄存器進行配置,使得圖像數據輸出為QVGA格式,在QVGA的基礎之上再次對輸出數據進行水平、垂直方向分別8抽樣,使得最終輸出為像素為60×80;幀同步輸出信號VSYNC引腳接入單片機P3.2口,由P3.2引腳捕捉該信號,當捕捉到幀同步輸出信號時,開始采集儀表圖像數據,圖像有效數據是通過單片機對有效像素信號捕捉獲取的,有效像素信號是指圖像傳感器像素時鐘信號PCLK接74HC74二分頻后與行同步信號HREF經過與非門的信號;主函數中對像素時鐘信號PCLK進行捕捉,在該信號有效時,選通圖像采集數據控制線,將圖像保存在緩存,然后使圖像數據線無效,將緩存數據存儲到62LV256存儲器中,這樣就得到了一個像素點的灰度值;行同步信號HREF接入單片機定時器T0中斷,當單片機捕捉到該信號時,行地址加1,當采集完最后一行時將標識置1,退出圖像采集程序,到此完成對一幀圖像的采集。
本文引用地址:http://www.104case.com/article/114480.htm一幀采集完事之后通過無線收發模塊傳送至控制中心,控制中心利用該數據按照BMP格式進行組裝,生成BMP文件顯示。74HC573主要是利用分時復用技術解決單片機資源不夠的問題。
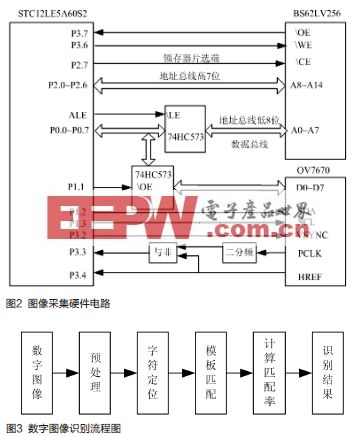
數字圖像識別流程
本系統采用C語言進行程序設計,通過控制圖像傳感器的場同步信號(VSYNC)、行同步信號(HREF)以及像素時鐘信號(PCLK),完成一幀圖像采集,并將采集到的圖像數據存儲到擴展的外部數據存儲器中。采集到的數字圖像先經過灰度變換、均值濾波、中值濾波、二值化等預處理[7]過程,濾除圖像中噪聲等無關信息,使圖像信息量最小化;其次對采集圖像進行字符定位;利用模板匹配的方法進行識別,計算匹配率,匹配率最大的就是識別的結果。數字圖像識別流程圖如圖3所示。
數字圖像預處理過程如圖4所示。經過預處理后,在標準模板基礎上采用模板匹配的方法就很容易得出數字圖像識別的結果。本系統在非理想環境下,經過大量的數據采集、識別實驗,識別結果正確率達95%以上,證明了系統的穩定性。
數字圖像識別在檢測系統中的應用
基于數字圖像識別技術的特點,我們將其應用在對建筑環境的水表識別系統中,通過無線網絡將水表的實時數據傳送給控制中心,這樣控制中心可以根據數據對水表進行實時監控,既減少了人為因素所造成的誤判,也減少由其他傳感器干擾引起的數據錯誤,提高了工作效率。
結合水表在建筑環境中應用的特點,我們設計了一個三層的無線網絡結構來實現水表數據和控制中心之間的傳輸。無線網絡拓撲結構如圖5所示。
三層組網模式中各層之間任務有明確分工,末端節點主要實現對水表數據的采集與識別,并將識別結果傳給控制中心;考慮到傳輸距離的問題,我們在末端節點與控制中心間加入了中繼器,中繼器是末端節點和控制中心間橋梁,其作用主要是將接收到的末端節點數據加強后傳送給控制中心,同時也能將控制中心的命令發送給末端節點;控制中心接收水表的實時數據,并對這些數據進行統一的管理。設計中控制中心最大可管理255個中繼器設備,每個中繼器設備可以接收255個末端節點所發送的數據。
無線網絡拓撲結構僅僅是一個網絡模式,要真正意義上實現網絡間的可靠通信,還必須依靠相應網絡通信協議的支持。本系統采用自定義的統一的通信包進行通信,通信數據是成幀成包發送的。系統總體數據傳輸流程示意圖如圖6所示。



評論