利用無傳感器矢量控制技術實現超高效率電機控制

近年來,隨著淺層和露天永磁體材料的不斷發展且越來越容易開采,工業應用中的高性能變速電機越來越多采用永磁同步電機(PMSM)。使用 PMSM驅動的先天優勢包括:高扭矩重量比、高功率因子、更快的響應、結實耐用的構造、易于維護、易于控制以及高效率。高性能速度和/或位置控制要求準確判定轉軸位置和速度,使相位激勵脈沖與轉子位置同步。因而電機軸上需安裝絕對編碼器和磁性旋轉變壓器(Resolver)等速度和位置傳感器。然而,在大多數應用中,這些傳感器會帶來多種弊端,例如:可靠性降低,易受噪聲影響,成本和重量增加,以及驅動系統更復雜等。無傳感器矢量控制則不需要速度/位置傳感器,因而這些問題也就不復存在。
本文引用地址:http://www.104case.com/article/111226.htm近年來, 關于 PMSM的無傳感器速度和位置控制方法,研究文獻中提出多種解決方案。 針對 PMSM驅動的無傳感器轉子位置估計,已開發出三種基本技術。
- 基于反電動勢(BEMF)估計的技術
- 基于狀態觀測器和擴展卡爾曼濾波器(EKF)的技術
- 基于空間顯著性跟蹤-初始定位的其它技術
反電動勢技術
基于反電動勢技術的位置估計根據電壓和電流估計磁通量和速度。在較低速度范圍內,這種技術對定子電阻特別敏感。由于機器的反電動勢很小,并且開關設備的非線性特征會產生系統噪聲,因此很難得到關于機器終端的實際電壓信息。在中高速范圍內,利用反電動勢方法可以獲得較好的位置估計,但在低速范圍內則不行。反電動勢電壓的幅度與轉子轉速成比例,因此靜止時無法估計初始位置。所以,從未知轉子位置啟動可能伴隨著暫時反向旋轉,或者可能導致啟動故障。EKF 能夠對隨機噪聲環境中的非線性系統執行狀態估計,因而對于 PMSM的速度和轉子位置估計,似乎是可行且具計算效率的候選方法。
基于空間顯著性跟蹤的技術利用磁顯著性,適合零速工作,可以估計初始轉子位置,而不會受其它參數影響。針對初始轉子位置,主要有兩種基本方法,分別基于脈沖信號注入和正弦載波信號注入。我們看一個例子。
反電動勢與初始啟動的平衡(來源于 Bon-Ho Bae):
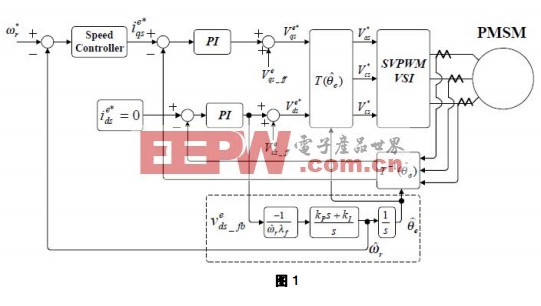
圖 1 為無傳感器矢量控制方案的框圖,其中不含位置傳感器。框圖中,軸間控制的前饋項 Vds_ff 和Vqs_ff 可以表示為:
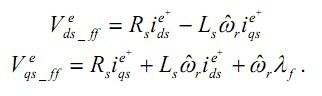
其中ωr 為轉子的轉速。












評論