基于硬件的無刷直流電機
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
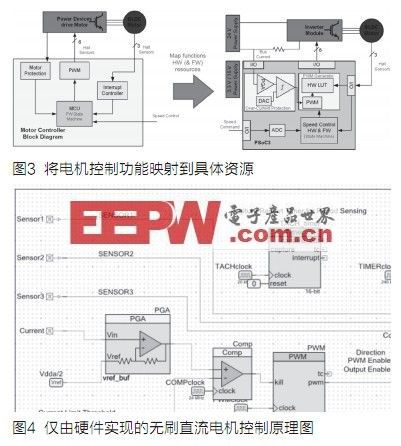
圖4是電機控制實現的示意圖。通過可配置硬件資源執行換相控制,硬件資源由PWM、硬件查尋表和硬件過流保護部分組成。集成ADC用于測量所需的模擬速度控制輸入。
硬件模塊的輸入控制信號為:
● 電機電流探測:通過模擬輸入引腳來探測和切斷電源設備,以在探測到過流狀態時對電機進行保護。
● 霍爾傳感器:三個數字輸入引腳連接到電機的霍爾傳感器的輸出。這些傳感器輸入提供了轉子位置,用于改變接到功率驅動器的PWM輸出信號來控制換相。
● 用戶接口控制
—方向控制:通過連接到開關的數字輸入來控制電機的順時針和逆時針旋轉;
—啟停控制:通過連接到開關的數字輸入來控制電機的啟停旋轉;
—速度命令:通過模擬輸入引腳來測量電位器上的電壓,設置所需的旋轉速度;
電機控制器輸出的信號即為電源設備驅動的信號:
—電源設備驅動高壓側的PWM信號;
—電源設備驅動低壓側的PWM信號。
生成的PWM基準信號連同三個霍爾傳感器輸入、運動方向和使能控制連接到硬件組合邏輯塊。該邏輯塊配置為利用PLD資源的查找表(LUT),并創建6個通過GPIO連接到外部電源驅動的PWM控制信號。圖5顯示了如何配置查找表。通過固件PI速度控制回路來調整PWM輸出的占空比。速度調整是唯一需要CPU參與的電機控制功能,然而,這對CPU的占用并不頻繁,因為速度控制回路可以以非常低的速率運行,并且不需要高優先級中斷。
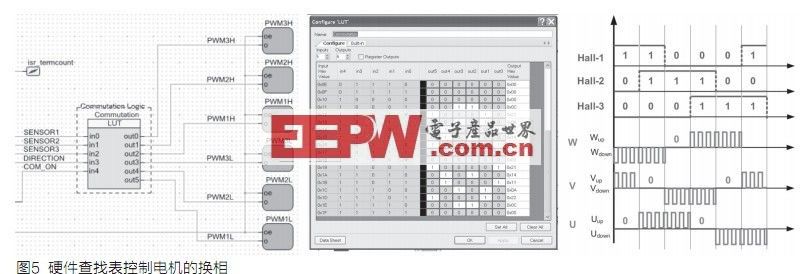
PWM控制信號到外部電源驅動器的序列產生電機的換相。該PWM配置為包括死帶,以防止在信號傳遞過程中啟用錯誤的線圈,并產生不需要的直通電流。通過配置硬件捕捉的定時器來測量轉速。從霍爾傳感器的上升沿觸發計時器,轉速存儲在寄存器中,可以在需要時通過固件速度控制回路來讀取。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理








評論