掌上多功能監護呼救定位系統的研制

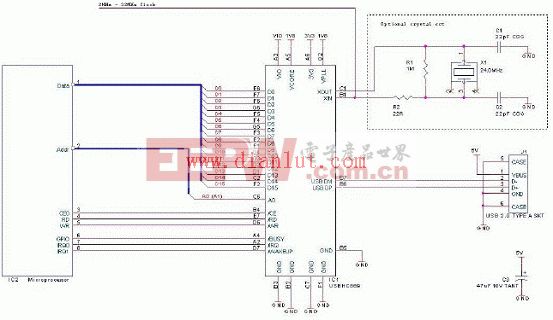
在實際設計中,由于輸入電壓有兩節AA電池提供,為2.4V,所以需要升壓電路,采用凌特公司的LTC3528,輸出電壓為4.7V;聯通入網SIM卡信息讀取電路的工作電壓為3V,設計中采用MICREL公司的MIC5219-3.0芯片執行電壓轉換工作;其他數字電路部分的工作電壓為3.3V,設計中采用MICREL公司的MIC5219-3.3芯片實現這一轉換。電路如圖6所示。
本文引用地址:http://www.104case.com/article/110407.htm
系統軟件設計實現
系統軟件的總體模型
本方案所述裝置按照系統功能設定,在工作中將執行多項任務:包括心電圖采集,加速度采集,數據存儲,響應用戶輸入和信息顯示等。由于MXT8051的片上資源不足以支持加載操作系統,故在進行軟件設計時,必需事先對軟件架構進行合理規劃。
不難發現,在上述多任務執行過程中,心電圖采集例程受系統采樣頻率的要求,A/D工作的時間間隔為4ms,其余各例程對執行時間沒有嚴格的要求,故考慮設定一4ms的定時器中斷作為系統工作的同步時鐘。在每一個時鐘中斷服務內,以掃描的方式逐一完成其他各任務例程。由于MXT8051的時鐘頻率為20MHz,單指令執行周期最多為4個時鐘周期,綜合考慮中斷跳轉和其他程序跳轉時間,如果在此中斷服務周期內遍歷多任務執行所需不超過3K~4K條指令,應該可以滿足系統對于實時性的需求。這也是后面進行軟件詳細設計時必須遵循的條件。
系統上電后,首先進行各項初始化操作,然后進入應用執行主循環。在應用主循環中,系統根據用戶設置選擇一種工作模式實現相應的功能。
工作模式說明
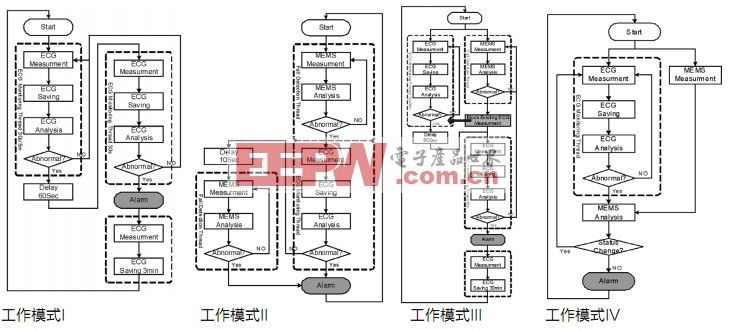
根據基本設計要求,本裝置可以提供4種應用工作模式,分別為:心率監護、跌倒檢測、心率監護+跌倒檢測和睡眠呼吸監護。各種工作模式的具體動作執行的配置參數見表1。

每種工作模式對應的操作流程圖如圖7所示。











評論