永磁同步直線電機硬件在環實時仿真平臺

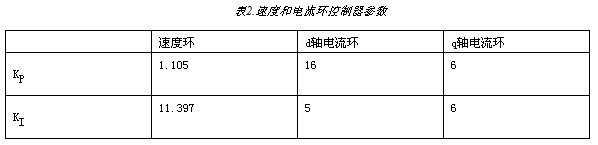
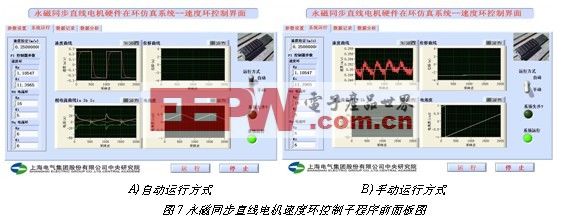
圖8給出了直線電機仿真器中的PWM波形圖。圖中可以明顯看出三對正、反相PWM波形的上下沿之間有死區延時,這樣可以避免逆變器上下橋臂中的IGBT同時導通,造成逆變器輸出電源正、負極短路危險。
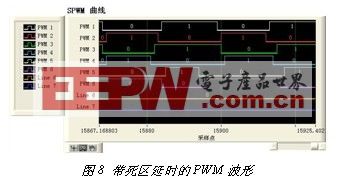
圖9給出了位置給定值分別為0.25、1.25和3.25m時位置環仿真結果,圖中下面的速度曲線對應于上面的位置給定曲線,位置環、速度環和電流環控制器參數如表3所示,位置環界面參見圖5。

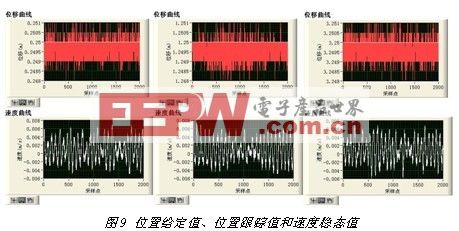
從圖9可以得出,在0.25~3.25m較大范圍內的位置給定值,系統的位置跟蹤誤差保持在-1.5~1um之間,且速度穩態值在-0.005~0.007um/s范圍內波動,系統達到較為理想的伺服運行狀態。本文的直線電機參數均取自于實際直線電機參數,運行結果與科爾摩根系統較為一致,從而驗證了本文所提算法的正確性。
四、結論
利用NI公司的虛擬儀器LabVIEW 8.6.1/RT/FPGA、cRIO9074與cRIO9004/9104軟硬件平臺,在較短的時間內搭建了一套永磁同步直線電機硬件在環實時仿真平臺,比采用其它傳統軟件開發平臺縮短了至少1倍以上的開發時間。該平臺的成功開發,使得在硬件在環條件下可以事先測試永磁同步直線電機的控制器算法,因而在實際驅動器開發過程中,必將節約成本和縮短研發時間,同時降低事故發生的概率。
矢量控制相關文章:矢量控制原理










評論