永磁同步直線電機硬件在環實時仿真平臺

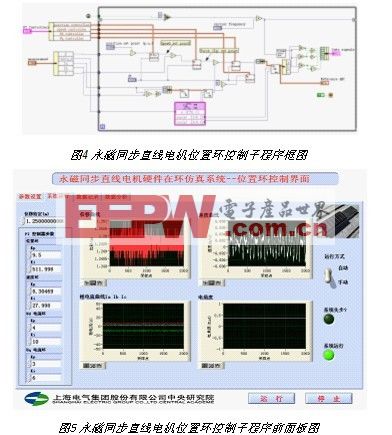
圖形顯示模塊:實時動態顯示直線電機的位移、速度、三相相電流、位置角度、PWM波形曲線。通過FIFO實現直線電機模型仿真模塊和直線電機控制器仿真模塊的FPGA與RT控制器進行數據實時交換。這部分子程序是在cRIO9074、cRIO9004的RT控制器中開發成功。
數據記錄與分析模塊:存取直線電機的位移、速度、三相相電流、位置角度、PWM波形等數據,分析直線電機電流、電壓諧波分布等,為進一步優化算法提供數據。這部分子程序同樣是在cRIO9074、cRIO9004的RT控制器中開發成功。
三、仿真實例
3.1 平臺的軟、硬件組成
永磁同步直線電機硬件在環實時仿真平臺軟、硬件組成如下:
軟件平臺:LabVIEW8.6.1/RT/FPGA
硬件平臺:
l cRIO9074、9401、9205和9215組成控制器仿真硬件平臺;
l cRIO9004、9104、9401和9264組成仿真器仿真硬件平臺
l 一臺PC計算機;
l 室內網絡。
圖6給出了永磁同步直線電機的硬件在環實時仿真與試驗平臺實物圖。

3.2 永磁同步直線電機參數
永磁同步直線電機參數見表1。

3.3 仿真分析
圖7給出了兩種不同的速度環運行方式,自動方式和手動方式,前者速度給定在![]() 0.25m/s周期跳變,后者保持速度給定值0.25m/s不變。從圖7中不難發現通過調節速度環、電流環控制器參數為一組合適參數,如表2所示,仿真的直線電機運行速度能夠在10ms左右時間內快速跟蹤速度給定,且穩態誤差在
0.25m/s周期跳變,后者保持速度給定值0.25m/s不變。從圖7中不難發現通過調節速度環、電流環控制器參數為一組合適參數,如表2所示,仿真的直線電機運行速度能夠在10ms左右時間內快速跟蹤速度給定,且穩態誤差在![]() 2um/s內。
2um/s內。











評論