基于S7-200的步進電機控制器設計

其合成的矢量幅值是不斷變化的,輸出力矩也跟著不斷變化,從而會引起滯后角的不斷變化。當細分數很大、微步距角非常小時,滯后角變化的差值已大于所要求細分的微步距角,使得細分失去了意義。據此分析,采用建立數學關系同時改變兩相電流,即Ia和Ib以某一數學關系同時變化,保證變化過程中合成矢量幅值始終不變。建立一種“額定電流可調的等角度恒力矩細分”驅動方法,以消除力距不斷變化引起滯后角的問題。這種合成矢量幅值保持不變的數學模型為:當Ia=Imcosx,Ib=Imsinx時(式中Im為電流額定值,Ia、Ib為實際的相電流,x由細分數決定),其合成矢量始終為圓的半徑,即恒力距;等角度是指合成的力臂每次旋轉的角度一樣;額定電流可調是指可滿足各種系列電機的要求;細分為對額定電流的細分(如圖2a和2b所示)。
本文引用地址:http://www.104case.com/article/108094.htm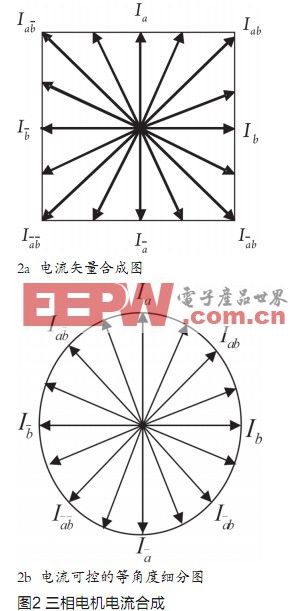
控制器設計
通常情況下,步進電機驅動系統由控制電路、驅動電路和步進電機三部分構成,如圖3a所示。圖3b為步進電機驅動控制電路的硬件連接框圖。

圖中I1.0、I1.1和I1.5為輸入控制信號端;Q0.0和Q0.1為兩路高速脈沖,分別負責驅動電機開啟定位和停止控制。
脈沖點火器相關文章:脈沖點火器原理







評論