基于DM642的智能視頻監控系統的DSP實現

算法設計與DSP實現
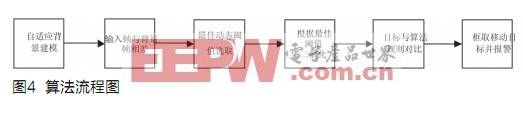
本文引用地址:http://www.104case.com/article/101027.htm基于DM642的智能視頻監控系統的核心是智能視頻監控算法,本算法可以實現對監控目標物越線產生報警,對貴重物體消失產生報警,對可疑物體產生報警。算法原理:首先利用改進的幀間差分法來初始化背景模型,得到自適應背景圖像[9];然后把當前圖像和背景圖像做差分運算;再使用動態閾值法對差值圖像二值化,引入形態學噪聲濾波器來消除噪聲影響[8];進而使用快速二值圖像連通域標記算法提取動目標;最后與用戶預先設置的警戒規則進行比較,如有違規,產生報警信息。算法流程如圖4所示。
自適應背景模型建立
在運動目標檢測過程中背景模型建立的準確與否直接影響到目標檢測結果的好壞。由于背景是個漸變的過程,所以采用了自適應背景更新方法:在視頻圖像序列中先假設第一幀圖像為參考圖像I0,在隨后的圖像序列中找兩幀圖像I1和I2,要求運動部分在I0,I1以及I2中所占區域沒有重疊,將三幀圖像的灰度值平均得到圖像I:
將圖像I與I0進行比較,如果差別較大(差值超出某一閾值T0),則為目標區域,否則為背景區域;在目標區域,進一步判斷I1與I2的灰度值,如差別不大(差值小于某一閾值T1),則可用I1或I2中對應區域作為背景對應區域,否則用I0中對應區域作為背景對應區域,經過這一替代,就可以得到一個不包含運動目標的背景圖像Ib。然后用此參考圖像初始化背景圖像模型,公式如下:

差值圖像建立及二值化
自適應背景BL產生后,每一幀視頻圖像將與BL差分,并得到差分后的差值圖像,進而進行二值化。在這一過程中,閾值選取的優劣是二值化結果好壞的關鍵。本文采用動態閾值法進行二值化處理。它的基本思想是對于需要二值化的每一幀差值圖像,確定一個最佳閾值,使圖像進行二值化處理后,能方便而準確的定位目標物。具體過程如下。











評論