馬斯克機器人炫技引千萬網友圍觀!

特斯拉機器人,開始干家務了。
馬斯克通過最新視頻,曬起特斯拉擎天柱機器人疊衣服,引發大量網友圍觀。

現在機器人疊衣服只需要3步,30秒一件。
第一步,先把衣服從籃子里拿出來,直接就疊好一邊袖子。
第二步,絲滑調整衣服位置,對齊另外半邊。
最后一頭一尾連續對折一氣呵成。
已經有人迫不及待詢問什么時候可以買到了。

也有網友提出,快給孩子買個謝耳朵同款疊衣板吧。
熱評第一則開始思考未來的人們會如何看待這一時刻。

鑒于之前火爆全網的斯坦福機器人做飯視頻引起了大量誤會,馬斯克稍后也補充了一個免責聲明:
重要提示:擎天柱目前尚不能自主執行疊衣服操作,但將來肯定能夠在任意環境(桌子不需要完全固定,籃子里也不需要只有一件衣服)中完全自主執行。
只說了不能完全自主,演示具體如何實現的馬斯克沒細說,但仔細看視頻里其實露出了馬腳。
從第8秒開始,右下角有一只機械手悄悄出現,動作軌跡與機器人完全一致,稍有一點延遲。
那么答案也很明顯了,與斯坦福的方法一樣,AI都是從模仿人類動作開始練起。

但正如AI預測蛋白質、AI畫圖等技術的發展過程,AI從能干一件事到超越人類也用不了多久。
硅谷資深科技博主Robert Dcoble認為少于17個月,你覺得呢?
這個會疊衣服的機器人,已經是特斯拉Optimus的二代目了,加上之前的原型機Bubmlebee,一共經歷了兩次大升級。

其中最值得關注的,是特斯拉為Optimus全新打造的手部。
與前一代相比,新款機器人的手不僅動作更快,自由度也增加到了11個,還新增了觸覺傳感器。
而且也懂得控制力度,從盒中捏起雞蛋,倒手,再放進碗里,整個過程沒有出現把雞蛋捏碎的情況。
除了手部以外,Optimus的頸部也進行了全新改版,采用鉸接式結構,擁有兩個自由度。
同樣在Optimus的腳上也采用了鉸接結構,并模仿了人類腳部的幾何形狀。
而從整體上看,Optimus的移動速度比前一代增加了30%,重量減輕了10公斤。
升級后的機器人,可以輕松完成深蹲的動作,整個過程都能很好地保持平衡。
不僅是特斯拉,進入2024年,人類在機器人上取得的新進展就如雨后春筍般出現。
2024,家用機器人元年?2024才剛剛過去半個月,包括特斯拉在內就已有至少4項機器人領域的突破性成果。
這些機器人的一個共性特征,是先通過模仿人類來學習,然后逐漸脫離人類操作實現自主行動。
比如斯坦福的ALOHA機器人,通過人類的遙操作可以完成烹飪等一系列復雜的動作,而人類的操作過程恰好也是機器人學習的素材。
經過學習之后,機器人可以自主掌握一些人類動作,從而完成特定的任務。
幾乎是在同一時間,谷歌DeepMind也發布了自己的機器人模型Robotics Transformer(簡稱RT)的升級版。
而且是三個框架聯發——RT-Trajectory解決泛化能力問題,SARA-RT用于提升決策速度,AutoRT則負責數據收集。
其中用于提升泛化能力的RT-Trajectory,主要是借助多模態大模型的視覺能力實現,學習素材同樣從人類的動作捕獲或直接人工繪制的軌跡。
緊隨斯坦福和DeepMind之后,機器人初創公司Figure也推出了自己的“咖啡機器人”Figure 01。
不需要任何的遙操作,它就可以自主完成打開機器蓋、放入咖啡、啟動機器的全過程,還能自主糾錯。
訓練時,Figure 01同樣是學習人類動作,只不過學習的方式是視頻。
只用了10個小時的端到端訓練,Figure 01就熟練地掌握了用機器制作咖啡的過程。
除了近期的幾項成果,稍早些的許多機器人項目,比如谷歌的HYDRA、英偉達的MimicGen等,也都采用了模仿人類的學習方式。
特斯拉機器人工程師Milan Kovac也具體介紹了這種技術路線的好處:
驗證當前的硬件能否勝任靈活地完成任務
收集訓練端到端神經網絡的數據,準備轉型全自動模式
積累足夠的數據多樣性,更快泛化到更多任務
從模仿人類到完全自動執行一項任務,再到泛化到更多樣的任務,成了智能機器人行業當今的大趨勢。
也在短時間內集中爆發大量突破性成果,讓機器人能執行的任務越來越接近實際需求。
技術有了發展,市場也給出積極回應。
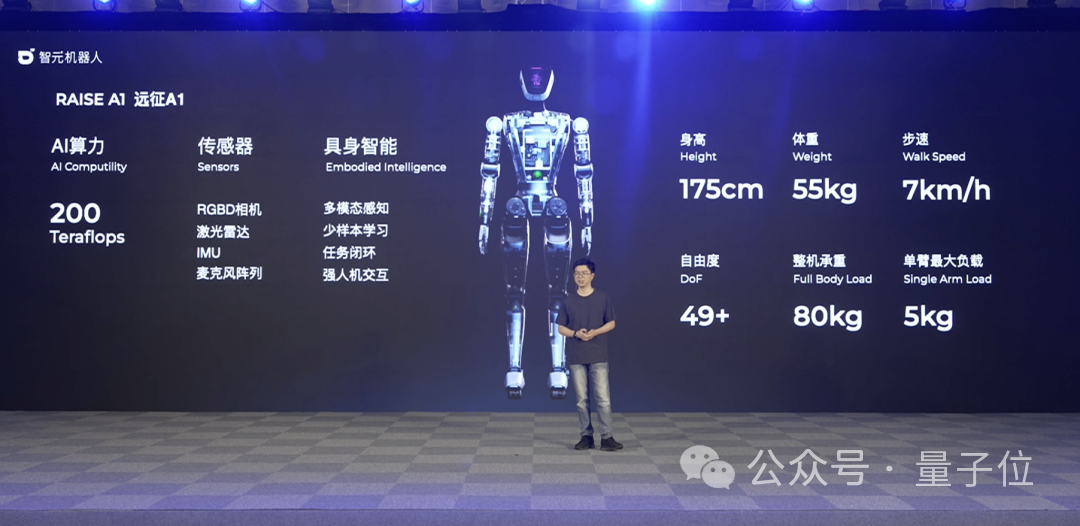
優必選科技成為人形機器人第一股,歷史上機器人首次參與了上市敲鐘。
華為天才少年稚暉君創辦的智元機器人估值超過10億美元,火速晉升獨角獸。
剛剛結束的科技盛會CES展上,機器人也是最火爆的。微軟CEO納德拉也到開普勒機器人展位參觀,聽取講解還頻頻點頭。
所以在AIGC元年,大模型元年之后,2024年真的會是人形機器人元年?
One More Thing有網友介紹了另一種完全不同的機器人機器人:
疊衣服速度是特斯拉擎天柱的50倍,成本還能減少95%。
不過就只能做疊衣服這一種任務了。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。
