基于激光雷達+慣導+輪速計的多傳感器融合定位方案

高精度定位是當前自動駕駛的基礎。隨著自動駕駛的日益發展,依靠單一傳感器進行定位常常會受到各種限制,比如GPS信號不穩定或者消失、長直走廊或隧道等場景下激光點云發生漂移、輪胎打滑等造成瞬時輪速計異常等。
,時長00:29
請務必備注704,優先通過!
講師簡介
任乾
自動駕駛建圖與定位總監
北京理工大學導航、制導與控制碩士。從2011年起,開始進入慣性導航、多傳感器融合定位領域,具有多種精度等級、多種配置、多種場景下的傳感器融合定位系統成功研發經驗。在IEEE Transactions on lndustrial Electronics,Sensors and Actuators等SCI期刊上發表文章,并撰寫知乎專欄《從零開始做自動駕駛定位》(累計閱讀70萬+)。課程大綱
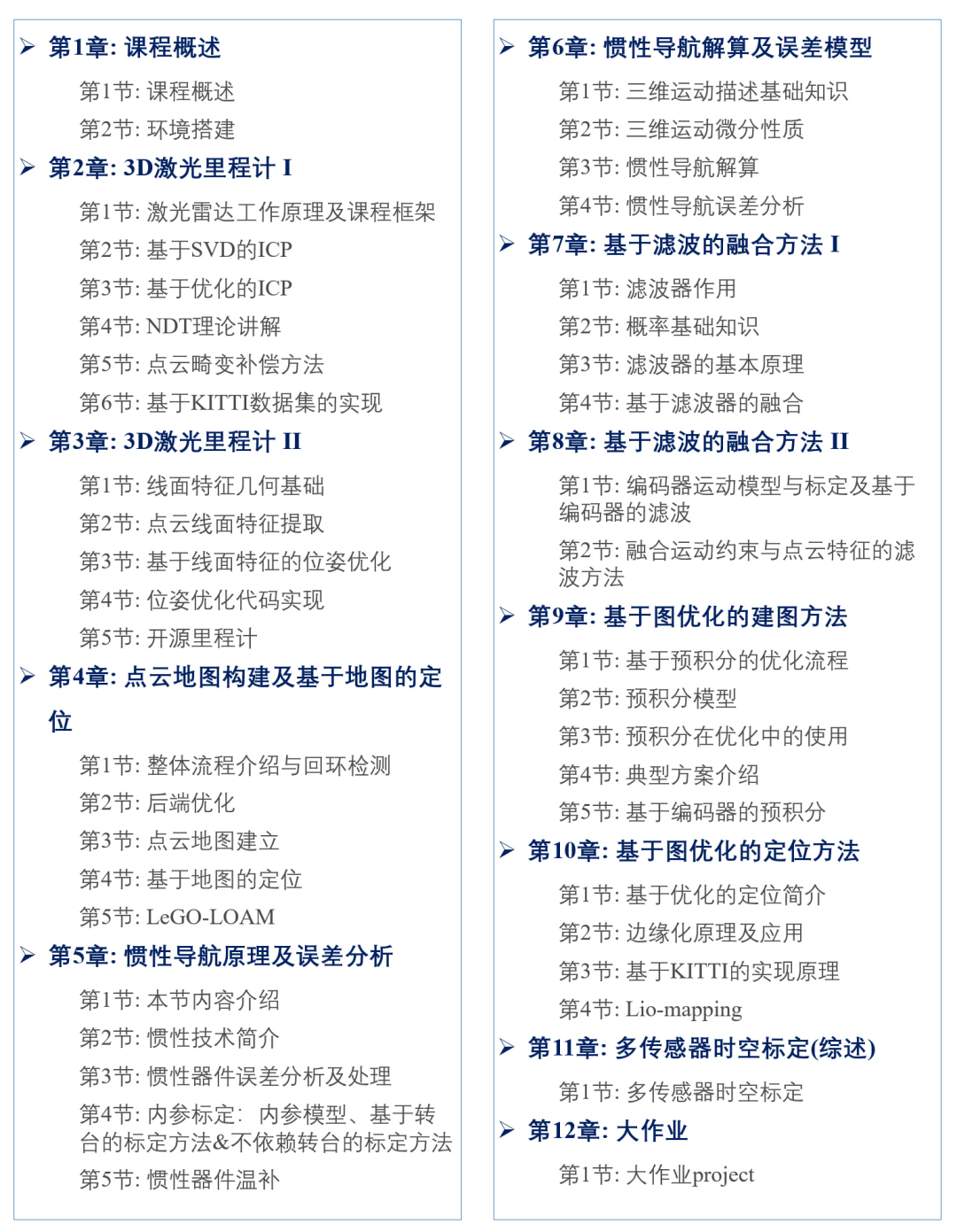
(點擊查看大圖)
項目實踐
本門課程采用理論與實踐相結合的教學方式,通過實踐項目,讓大家將課上所學知識,即學即用,通過親自動手實踐達到靈活掌握,融會貫通的效果。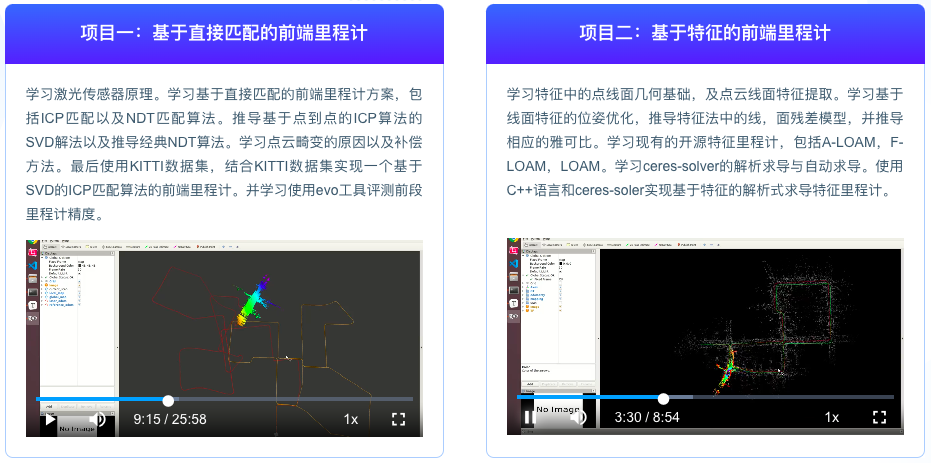

(點擊查看大圖)
學后收獲
1. 掌握常用3D激光SLAM算法的原理以及代碼實現,并具備根據需求改進算法的能力;
2. 掌握點云地圖構建及基于地圖定位的原理,具備獨立建圖和定位的工程能力;
3. 掌握慣性器件誤差特性及標定、溫補方法,以及多傳感器時空標定的方法;
4. 熟悉基于濾波的和基于圖優化的多傳感器融合方法,并有能力實現一套融合系統。還能收獲
1. 優質的學習圈子伙伴們大多是來自985、211及海外院校碩博,在這里大家一起學習、進行討論與研究。獨一無二的優質圈子將是你未來學習與就業的寶貴資源。(學員院校&企業展示)2. 企業認可的證書
學完課程后將有機會收獲優秀學員證書、****書,為你的簡歷加分添彩。
課程服務
1. 三師助力講師&助教及時答疑解惑,班主任全程帶班督學,幫你克服拖延,不斷進步。 2. 定期班會助教1V1批改作業,并在班會中進行講評和指導;在班會中,學習更多技巧;在交流中收獲更多思路。優惠名額有限
掃碼添加,領取試聽
詳情咨詢備注704,優先通過!

添加客服『書哲』,獲取更多信息
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。
