地平線:芯片算力并非越大越好,還得比使用效率
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
汽車芯片算力是不是越大越好?
這不,地平線前不久特意舉辦了一場(chǎng)活動(dòng),對(duì)此展開(kāi)了激烈探討。
一邊是產(chǎn)業(yè)界代表,包括地平線副總裁余軼南,以及理想汽車自動(dòng)駕駛產(chǎn)品總監(jiān)趙哲倫。
他們站在產(chǎn)品設(shè)計(jì)者的角度,對(duì)背后初衷和技術(shù)原理進(jìn)行了生動(dòng)闡述。

另一邊則是車主代表,從自己一線的用車體驗(yàn)出發(fā),暢談了對(duì)算力的實(shí)際感知和需求大小。
不過(guò),除了聽(tīng)他們動(dòng)動(dòng)嘴皮子談理論,對(duì)于基于地平線征程5芯片打造的理想AD Pro高速NOA,這次智能車參考也親身上車體驗(yàn)了一番。
算力真的越大越好嗎?首先拋觀點(diǎn):算力并非越大越好。
其中,理想汽車趙哲倫表示,
從產(chǎn)品選擇層面出發(fā),如果單純地看算力,肯定是算力越大越好。但是對(duì)于一款面向用戶的、要去量產(chǎn)的產(chǎn)品來(lái)講,除了算力以外,我們要考慮它的功耗、成本、整體運(yùn)行效率,這是非常重要的,在這里面可以取到我們認(rèn)為最合適的。
大致意思是,算力并不能作為衡量車載芯片的唯一指標(biāo)。
地平線余軼南也有類似的觀點(diǎn)。他表示,地平線在設(shè)計(jì)芯片時(shí)不光是把算力考慮在內(nèi),同時(shí)更注重在最大算力的前提下,芯片的使用效率是不是可以做到非常高的水平。
怎么理解這個(gè)使用效率?
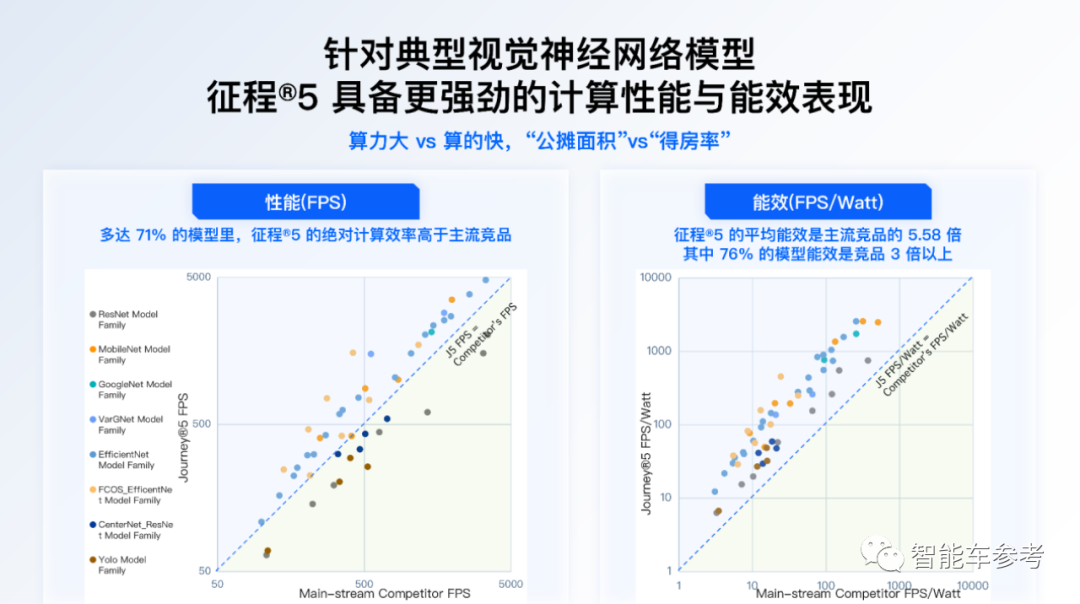
以地平線征程5芯片舉例,它具備128TOPS算力,F(xiàn)PS(每秒準(zhǔn)確識(shí)別的圖像幀數(shù))為1531,延遲為60MS,功耗為30WATT。
地平線將FPS定義為性能指標(biāo),認(rèn)為FPS才更能反映一顆車載智能芯片的真實(shí)計(jì)算性能。余軼南打比方說(shuō):“FPS基本上可以類比于汽車的百公里加速,都是在看單位距離/時(shí)間下能做多少事情。”
而且基于這樣的前提,他們得出了如下結(jié)論:
FPS方面,在多達(dá)71%的模型里,征程5的絕對(duì)計(jì)算效率高于主流競(jìng)品。事實(shí)上來(lái)講,在128TOPS算力下,其實(shí)征程5比某些200TOPS以上的芯片,都能產(chǎn)生更大的“得房率”。FPS/Watt方面,征程5的平均能效是主流競(jìng)品的5.58倍,其中76%的模型能效是競(jìng)品3倍以上。
其實(shí)在業(yè)內(nèi),一直以來(lái)針對(duì)“車企是否應(yīng)該卷算力”展開(kāi)的討論,非常多。
一部分人贊同。奇點(diǎn)汽車首席戰(zhàn)略和品牌發(fā)展副總裁趙強(qiáng)曾經(jīng)就表示,“車企無(wú)論是主動(dòng)還是被動(dòng),都必須迎接這場(chǎng)無(wú)條件、無(wú)盡頭的算力軍備競(jìng)賽,即便目前自動(dòng)駕駛還沒(méi)有完全落地,仍然是硬件為先。”
但更多的人不這么看。
上汽人工智能實(shí)驗(yàn)室的喬博士曾談到,“實(shí)現(xiàn)L2級(jí)自動(dòng)駕駛只需10Tops以下的算力,即便是實(shí)現(xiàn)L4級(jí)自動(dòng)駕駛也只需100Tops左右的算力,只有到了真正無(wú)人駕駛的L5級(jí),才需要1000+Tops的算力。”
一位自動(dòng)駕駛公司算法工程師曾表示,“我是不太在乎500TOPS還是1000TOPS這些數(shù)字的,因?yàn)檎娴臎](méi)多大用處——你可能算力升級(jí)了,但如果軟件架構(gòu)還是停留在三四年前的老版本,那么算力的性能也就無(wú)法充分地發(fā)揮出來(lái),算力再大也不夠用。其實(shí),通過(guò)對(duì)軟件架構(gòu)做個(gè)調(diào)整,就能避免這個(gè)問(wèn)題。”

那么問(wèn)題來(lái)了,既然芯片算力并非唯一衡量指標(biāo),一線購(gòu)車用戶又如何進(jìn)行衡量評(píng)判,最終挑選出自己心儀的智能車?
在這次活動(dòng)現(xiàn)場(chǎng),產(chǎn)業(yè)界代表和用戶代表,都發(fā)出了各自的聲音。
用戶方面,一位理想老車主表示,他主要是基于兩方面進(jìn)行評(píng)判,一方面是看屏幕界面顯示的是否足夠清晰,來(lái)判斷車對(duì)周圍環(huán)境的感知能力;另一方面,看車輛在處理突發(fā)問(wèn)題的時(shí)候,能否更好地完成主動(dòng)變道、主動(dòng)避讓。

產(chǎn)業(yè)界代表則給出了如下指引。
其中,理想趙哲倫提到,可以看車對(duì)周遭環(huán)境是否識(shí)別得足夠多、足夠精準(zhǔn),還要看車是否具備了像人類老司機(jī)一樣的預(yù)測(cè)能力。
舉例就是,比如車輛的加減速是否平順?自身車輛對(duì)于前方加塞的反應(yīng)快不快?對(duì)于各種緊急場(chǎng)景的應(yīng)對(duì)能力表現(xiàn)如何?
地平線余軼南進(jìn)一步談到,主要是看車輛能否識(shí)別得更精準(zhǔn)、更多、更豐富;然后是看預(yù)測(cè)能力——現(xiàn)在最先進(jìn)的算法,可以做到把一些沒(méi)有被看到的區(qū)域,通過(guò)經(jīng)驗(yàn)?zāi)X補(bǔ)的方式預(yù)測(cè)出來(lái);還有就是看延時(shí)是否足夠低。
簡(jiǎn)單舉例,比如可以看前車加減速的時(shí)候,自車的反應(yīng)速度是否足夠快。如果當(dāng)前車剛一減速的時(shí)候,自車就開(kāi)始緩行;當(dāng)前車剛一加速的時(shí)候,自車很快就可以跟上——諸如此類是用戶能夠直觀感受到的、比較好的體驗(yàn)。
實(shí)際體驗(yàn)究竟如何?拋開(kāi)各項(xiàng)紙面指標(biāo),實(shí)際體驗(yàn)究竟如何?
我們這次體驗(yàn)的車型是理想L8 Pro,該車搭載了理想智駕系統(tǒng)AD Pro,標(biāo)配高速NOA。

硬件配置上,這款車內(nèi)置單顆地平線征程5芯片,具備1個(gè)800萬(wàn)像素?cái)z像頭、9個(gè)200萬(wàn)像素?cái)z像頭、1個(gè)毫米波雷達(dá)。
接下來(lái),我們從不同場(chǎng)景挨個(gè)來(lái)看高速NOA的實(shí)際體驗(yàn)。
首先,在有高精地圖覆蓋的區(qū)域,撥動(dòng)方向盤撥桿兩次,車輛會(huì)自動(dòng)開(kāi)啟導(dǎo)航輔助駕駛。
進(jìn)入高速公路路段后,車輛會(huì)根據(jù)路線適時(shí)完成自動(dòng)變道超車。總體來(lái)看,理想這款車的變道策略相對(duì)較為保守。只有在確認(rèn)足夠安全的前提下,才會(huì)進(jìn)行變道。
當(dāng)距離右側(cè)方車輛較近的時(shí)候,車輛會(huì)自動(dòng)向左稍稍進(jìn)行避讓:
值得一提的是,當(dāng)系統(tǒng)檢測(cè)到司機(jī)脫手方向盤超過(guò)15秒,就會(huì)語(yǔ)音報(bào)警,提示你接管車輛。
在進(jìn)入匝道時(shí),車輛會(huì)自動(dòng)減速,行駛較為平穩(wěn)。
在過(guò)大曲率彎道時(shí),也完成的比較好,無(wú)需司機(jī)接管。
當(dāng)車輛進(jìn)入了沒(méi)有高精地圖覆蓋的區(qū)域,會(huì)自動(dòng)降級(jí)為LCC車道保持。
從整個(gè)語(yǔ)音播報(bào)來(lái)看,邏輯是比較清晰的,乘客能夠知道車輛下一步要做什么,讓人產(chǎn)生安全感。
總結(jié)一下這次體驗(yàn),無(wú)論是自動(dòng)上下匝道、變道超車、過(guò)大曲率彎道等等,高速NOA下各項(xiàng)功能都表現(xiàn)得比較流暢和穩(wěn)定,和人類老司機(jī)相比其實(shí)感覺(jué)不出什么差別。

針對(duì)變道比較保守這一點(diǎn),在現(xiàn)場(chǎng)分享過(guò)程中,理想趙哲倫就有提到——
他們當(dāng)時(shí)在定義整個(gè)產(chǎn)品的時(shí)候,希望能為乘客帶來(lái)至少是專車的體驗(yàn),其實(shí)在NOA功能的變道決策里,他們?cè)究梢蕴峁┤N選項(xiàng)(對(duì)應(yīng)三類決策算法),但從目前階段來(lái)看,是想先做好一套大家基本能夠接受的、跟產(chǎn)品定位相關(guān)聯(lián)的、更偏家庭的、比較穩(wěn)定的智駕產(chǎn)品,之后再根據(jù)細(xì)分的用戶需求進(jìn)行算法的補(bǔ)充。

當(dāng)然,除了在高速公路上,這款車在城市場(chǎng)景里也能提供比較好的安全性,例如能夠防加塞、路口智能跟停,以及在紅綠燈及十字路口能夠完成有效通行;在停車場(chǎng),還能實(shí)現(xiàn)自動(dòng)泊車和遙控泊車。而且實(shí)現(xiàn)以上這些功能,統(tǒng)統(tǒng)都是基于單顆地平線征程5芯片,算力僅128TOPS。
所以看到這里,對(duì)于車載智能芯片是否需要那么大的算力,你的心里或許已經(jīng)有了答案?
來(lái)源:智能車參考
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。
