實現ARM+ROS(機器人操作系統)之運行ROS!

如何低成本搭建ARM+ROS的硬件載體?上文展示ROS部署前的籌備工作及步驟分解,本文將為大家演示ROS的移植及測試方法。
經過前面的環境搭建,HDG2L-IoT評估套件已經能穩定地運行Ubuntu+docker環境,當前需要下載運行ROS鏡像即可。
本文參考ROS官方文檔《Getting started with ROS and Docker》,結合我司的HDG2L-IoT評估套件實現ROS方案完全搭建流程,參考****如下所示。

目前docker官網提供了搭建好的ROS鏡像(支持arm64架構),****為:

如下所示。
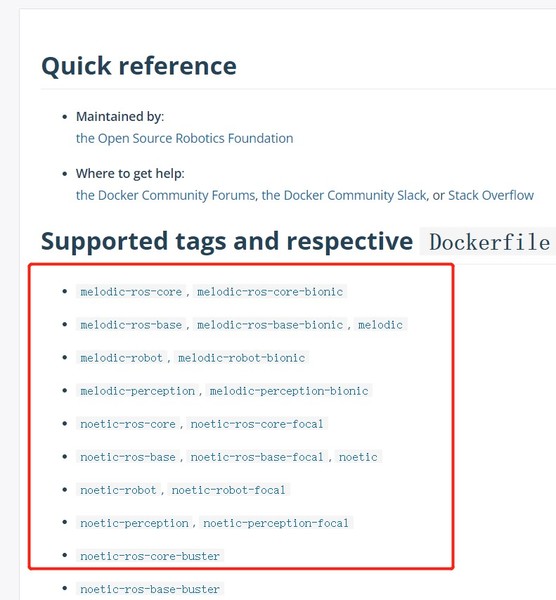
下載命令如下所示,<tags>填入上圖的字符串。

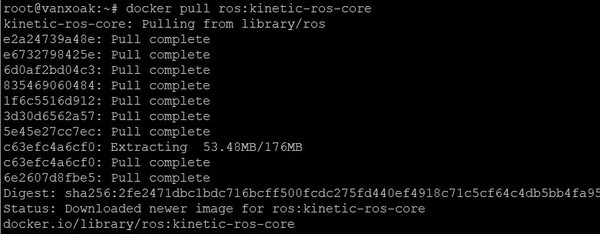
根據項目需求選擇合適的ROS鏡像,本例以kinetic-ros-core為例,下載命令如下所示。

下載完成如下圖所示:
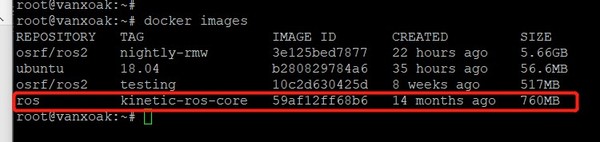
查看鏡像的命令:

使用下載下來的ROS鏡像來啟動容器,命令如下所示。

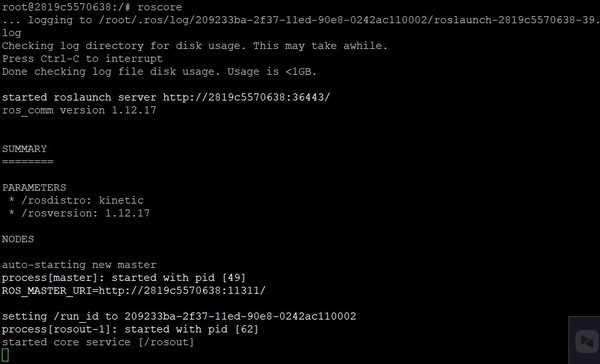
以終端模式進入ROS容器。
進入后運行roscore來啟動運行ros節點必要的ROS Master和ROS parameter,運行情況如下所示。
至此,我們通過三篇文章從硬件與底層、環境搭建、ROS運行等方面為大家介紹了一個全新的ARM+ROS的軟硬件實現方案。文章中若有不明之處或需要技術問題交流請隨時聯系萬象奧科官方。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。











