LabVIEW角點檢測(基礎篇—10)

圖像的特征是圖像的原始特性或屬性,它包含圖像中的關鍵信息,是機器視覺算法工作的基礎。
圖像的灰度、邊緣、輪廓、紋理、色彩和顆粒屬性等都可作為圖像的特征,它們均從某一維度對圖像中的目標關鍵屬性進行描述。然而,在實際工作中,有時需要尋找一種可以對圖像的各個局部都能進行抽象描述的特征。
例如,若要在圖像存在****畸變且被測目標會發(fā)生旋轉和縮放的情況下,對圖像中多個關鍵部分進行關聯(lián)拼接,然后再進行目標識別或匹配,此時就需要使用一種可以對旋轉、縮放和畸變均保持不變的局部特征。
角點(Corner Point)是解決這類問題的一種理想選擇。
1
角點檢測概念
圖像中的興趣點(又稱為關鍵點、特征點)是在圖像中容易檢測且具有代表意義的點。基于這些點,可以進行目標識別、圖像匹配和缺陷檢測等。角點是圖像中最基本的一種興趣點,它可定義為圖像中兩個邊緣的交點,或目標輪廓線上曲率的局部極大點。角點特征具有計算量少,匹配簡單以及旋轉、平移、放縮不變性等特點,因此在圖像配準與匹配、目標識別、運動分析、目標跟蹤等應用領域都起著非常重要的作用。
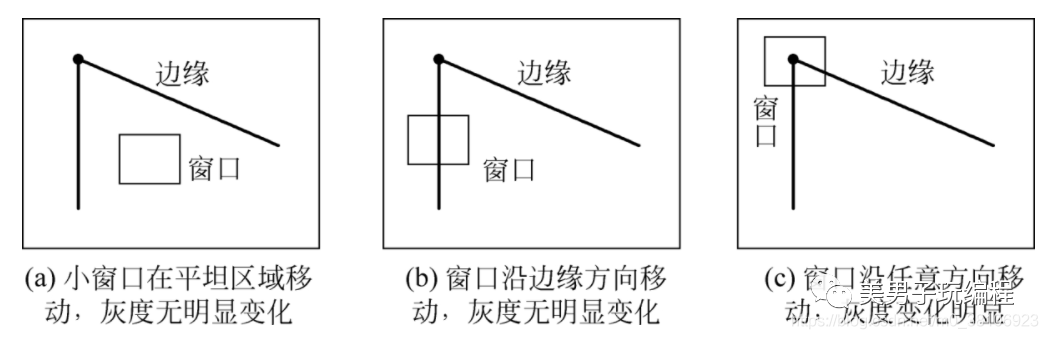
圖像在角點處不僅梯度的數(shù)值大,而且梯度方向的變化速率也很大。也就是說,角點顯示了圖像在二維空間內(nèi)灰度變化劇烈的位置,它和周圍鄰點有著明顯差異。
例如,下圖中,當小窗口位置在任意方向上發(fā)生變化時,含有角點的窗口的灰度就會有明顯變化。因此可以通過計算圖像中的角點獲知圖像各個局部的信息,從而實現(xiàn)對圖像的一種抽象描述。而基于該抽象描述,即可進行圖像的匹配及識別等工作。
2
角點檢測流程
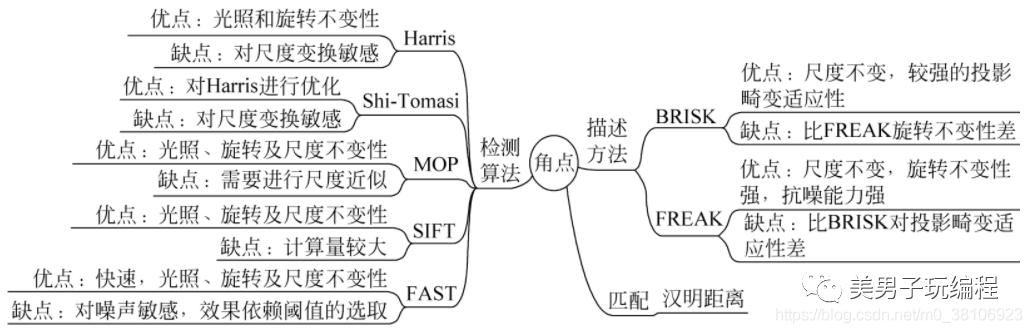
以角點為特征的機器視覺應用一般涉及角點檢測、角點描述和角點匹配3個過程。
角點檢測過程使用Harris、Shi-Tomasi或FAST等算法來確定圖像中的角點。角點描述過程使用BRISK (Binary Robust Invariant Scalable Keypoints)或FREAK (FastRetina Keypoint)方法,基于檢測到的角點生成以二值方式編碼的特征向量。而角點匹配過程則計算兩幅圖像二值特征向量之間的漢明距離,并依據(jù)距離的大小來判斷其是否匹配。
下圖對常用的角點檢測、描述及匹配方法進行了匯總。
3
角點檢測實踐
Nl Vision使用位于LabVIEW的視覺與運動→Machine Vision→Feature
Correspondence函數(shù)選板中的IMAQ Corner Detector和IMAQ FAST Feature PointDetector封裝角點檢測過程,返回從矩形ROI中檢測到的角點坐標和強度。
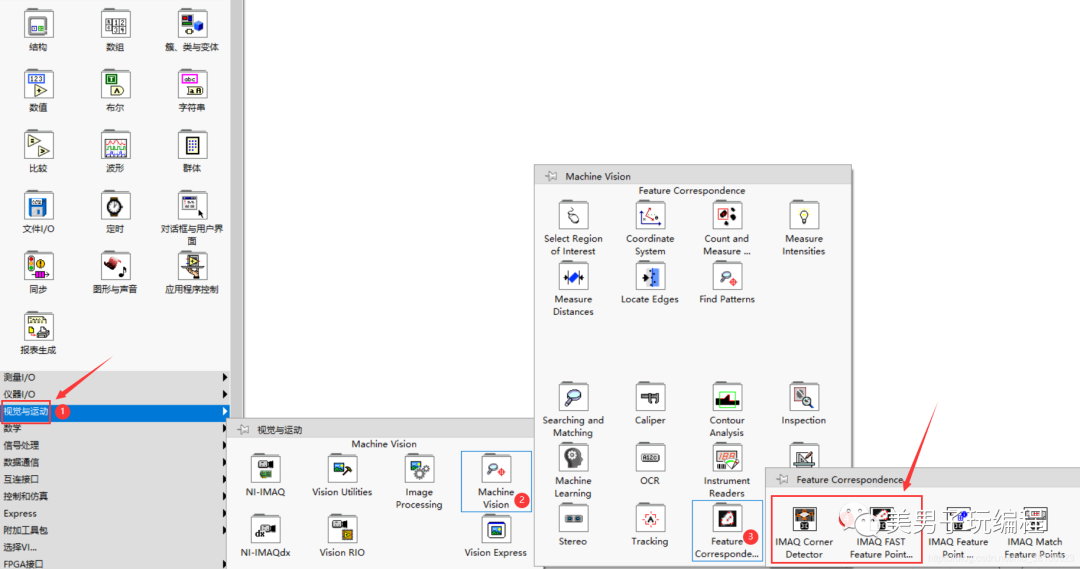
其中IMAQ Corner Detector封裝了Harris和Shi-Tomasi角點檢測算法,且支持在圖像不同的金字塔圖層進行多尺度檢測。換句話說,在進行角點檢測時,它不僅能對光照和旋轉變化保持不變性,還能通過多尺度的近似方法對圖像的縮放變化保持不變性。
lMAQ FAST Feature Point Detector封裝了FAST檢測算法,它以像素為中心,取距其半徑為3的圓環(huán)上的16個點,若其中有連續(xù)的12個點的灰度與像素的灰度差超過輸入?yún)?shù)Min Feature Point Strength設定的閾值,就將像素標記為角點。VI對于光照、旋轉和尺度變化保持不變,但是當圖像中噪點較多時,F(xiàn)AST健壯性較差,而且算法的效果也依賴于閾值的選取。
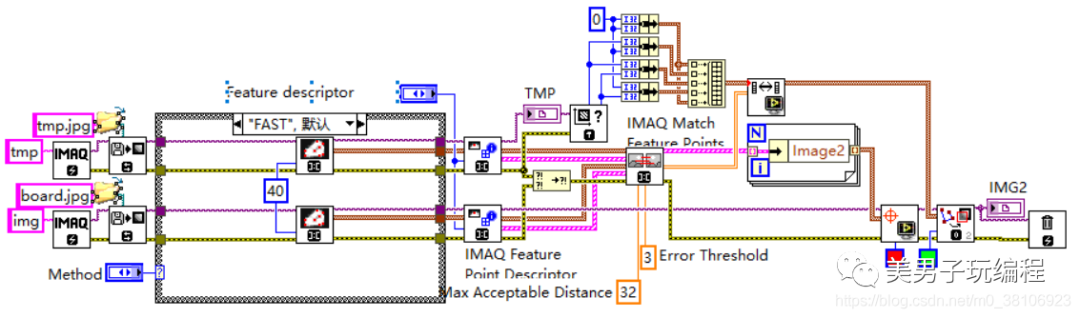
通過使用角點特征進行圖像匹配的實例,了解角點算法的應用,程序設計思路如下所示:
程序首先為模板圖像和待檢測圖像分配緩沖區(qū),并將它們分別讀入內(nèi)存;
隨后調用IMAQ FAST Feature PointDetector,基于FAST算法分別檢測兩幅圖像中的角點,并由IMAQ Feature PointDescriptor以FREAK算法對角點信息進行二進制描述;
這樣一來,從圖像中檢測到的各個角點特征都可以由一個二進制的角點特征字符串表示;
IMAQ Match Feature Points能通過計算各個角點特征字符串之間的漢明距離,在設定的最大可接受距離范圍內(nèi)(本例為32),對兩幅圖像中的角點進行匹配關聯(lián)。
程序設計如下所示:
程序運行效果如下所示:
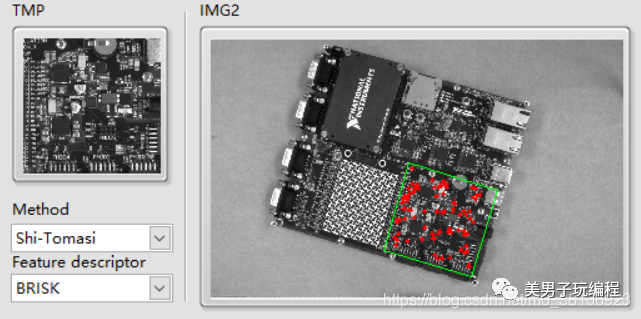
IMAQ Match Feature Points還能基于在兩幅圖像中匹配到的角點坐標,返回它們之間的單應性矩陣(Homography Matrix)。在機器視覺領域中,若成像系統(tǒng)可抽象為針孔比如,通過旋相機,則空間中同一平面內(nèi)的任意兩幅圖像就可由單應性矩陣進行關聯(lián)。比如,通過旋轉相機鏡頭可獲取某一個物體的兩張不同圖像,這兩張圖像的內(nèi)容不可能只有部分對應。
若存在一個二維的3×3矩陣,與其中一幅圖像相乘可得到第二幅圖像,則該矩陣就稱為兩幅圖像的單應性矩陣。單應性矩陣可以通過兩幅圖像中對應的4個特征點來計算,一旦得到單應性矩陣,就可以在已知原圖像中關鍵特征點坐標時,計算得到其在匹配圖像中的坐標位置。如上述例子所示,程序使用IMAQ Match FeaturePoints計算得到的單應性矩陣,在檢測圖像中標出所匹配到的目標范圍。
角點是圖像中一種特殊的特征點,基于角點進行圖像檢測和匹配,能在較難找到圖像特征的情況下,創(chuàng)建圖像拼接或圖像匹配應用。常見的角點檢測方法有Harris、Shi-Tomasi和FAST等。計算兩幅圖像角點特征向量之間的漢明距離即可完成角點的匹配。基于4個以上的匹配角點,可求得關聯(lián)兩幅圖像的單應性矩陣,進而基于此矩陣,就能確定模板圖像的位置。
*博客內(nèi)容為網(wǎng)友個人發(fā)布,僅代表博主個人觀點,如有侵權請聯(lián)系工作人員刪除。

逆變器相關文章:逆變器原理
逆變器相關文章:逆變器工作原理
電荷放大器相關文章:電荷放大器原理