開關電源環路學習筆記(6)-開關變換器傳遞函數Gvd(s)推導過程

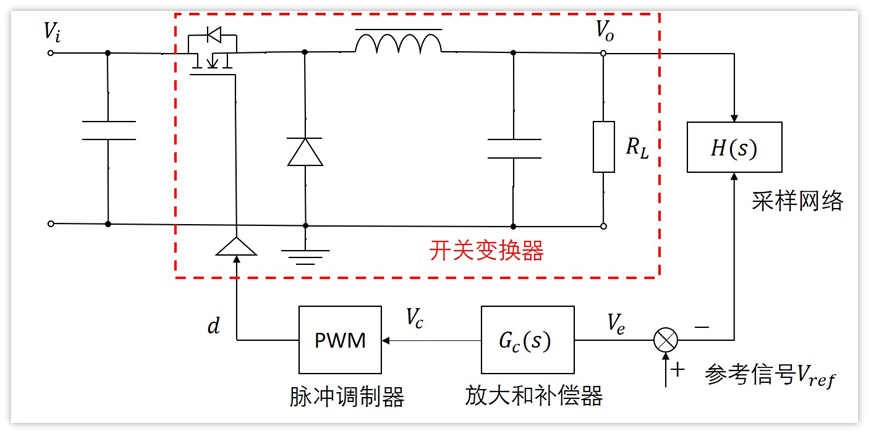
終于到了最關鍵的環節,也是最難的環節,如何求出開關級的傳遞函數?
也就是下圖這一級。
哎,不得不說,太難了。。。
不過沒辦法,先前夸下海口,跟兄弟們說我要把環路搞清楚,現在搞不動也得搞啊。

這一級之所以這么難,主要是有開關元器件,本身是非線性的。
當然了,前面第2小節我們已經闡明了,在滿足低頻,小信號等條件下,也可以看成是線性的,這里就不再說了。
那么如何求解傳遞函數呢?
求解方法
求的方法有很多種,常見的有下面這幾種:
1、小信號模型的建模思路——基本建模法
2、狀態空間平均法
3、開關元件平均模型法
4、開關網絡平均模型法
上面這幾種方法在《開關變換器的建模與控制+張衛平編著》這本書中都有非常專業詳細的講解。其實我此章也主要是看這本書進行的一個總結。
我個人覺得最好的應該是第4種——開關網絡平均模型法,或者說這是我最喜歡的方法吧,也是我深入去看的一種方法。
不過原書中的方法會畫出有變壓器的等效電路,我不喜歡引入變壓器,所以我下面介紹的過程是沒有引入變壓器的,直接推導出的公式。
Buck的CCM模式求解過程
求解過程主要有這么幾步:
1、二端口等效
2、端口參數關系,推導出兩個式子
3、代入電路,結合原理推導出傳遞函數
二端口等效
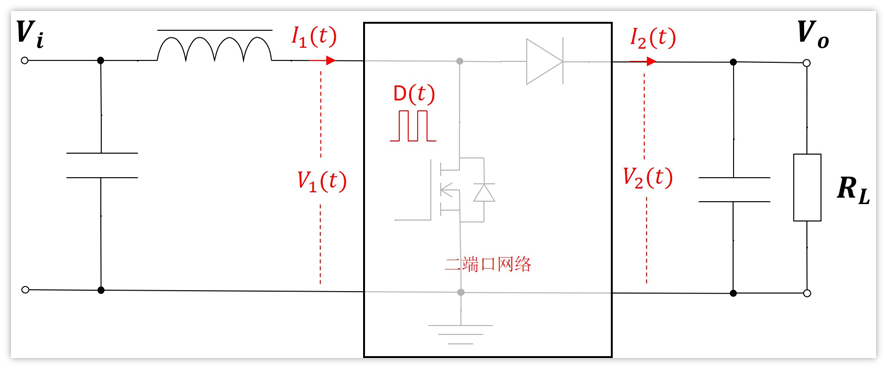
先來看二端口等效是怎么回事,下面是buck的拓撲。
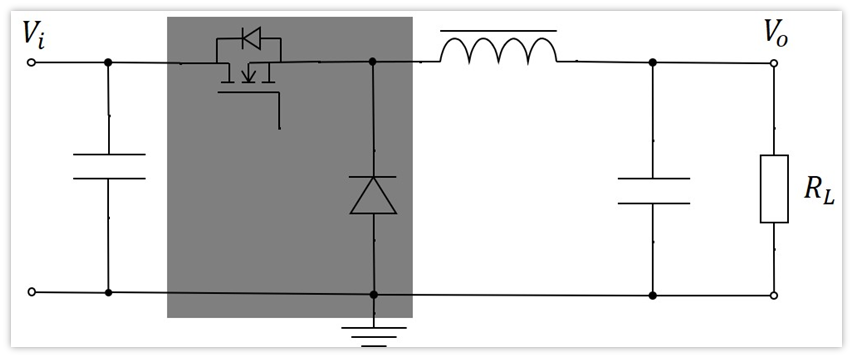
最難搞的就是里面這個MOS管和二極管了,那咋整呢?
干脆就把它看作一個整體,對外有四根線,同時底下兩根線接地,所以也就是說有兩個端口,是一個二端口網絡。
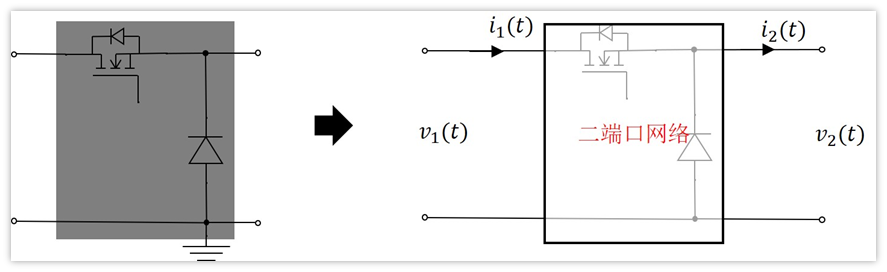
那么電路變成下面這樣的了
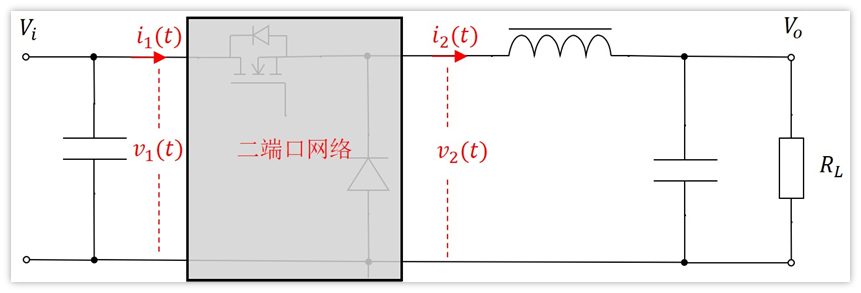
按照上圖一等效,好像也沒什么卵用,反而更加不熟悉了。先不著急
我們需要先對i1(t),i2(t),v1(t),v2(t)取開關周期的平均值,注意,是開關周期平均值,而不是總時間平均值。因為如果是總時間的平均值,那就只是直流等效了。
這里多一嘴,說說開關周期平均值和總時間平均值有什么差別,因為我在這里想了比較久,并且看起來兩個值好像是一樣的。
確實,如果是穩態,沒有干擾信號,負載恒定,上述變量在每一個開關周期內的平均值都是一樣的,并且等于總時間的平均值。
但是如果有干擾信號,那么可能上一個周期的平均值跟下一個周期的平均值不一樣,也就是它是時間的函數。我們現在分析傳遞函數,就是分析干擾信號的影響,自然不能只看直流等效了,所以求的是開關周期的平均值。
那問題來了?求開關周期的平均值合理嗎?
其實這里就有用到前面所說的線性化條件——低頻信號假設,我們研究的信號大大低于開關頻率,因此求開關周期的平均值是合理的。
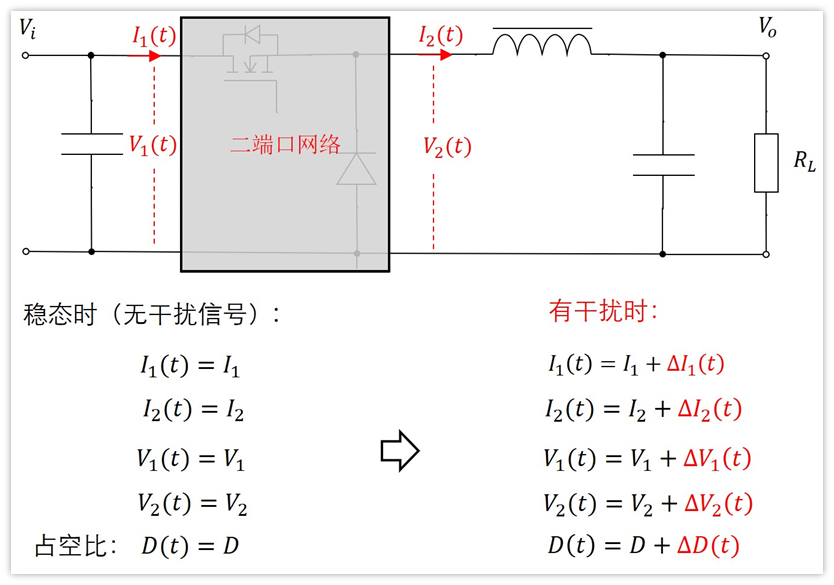
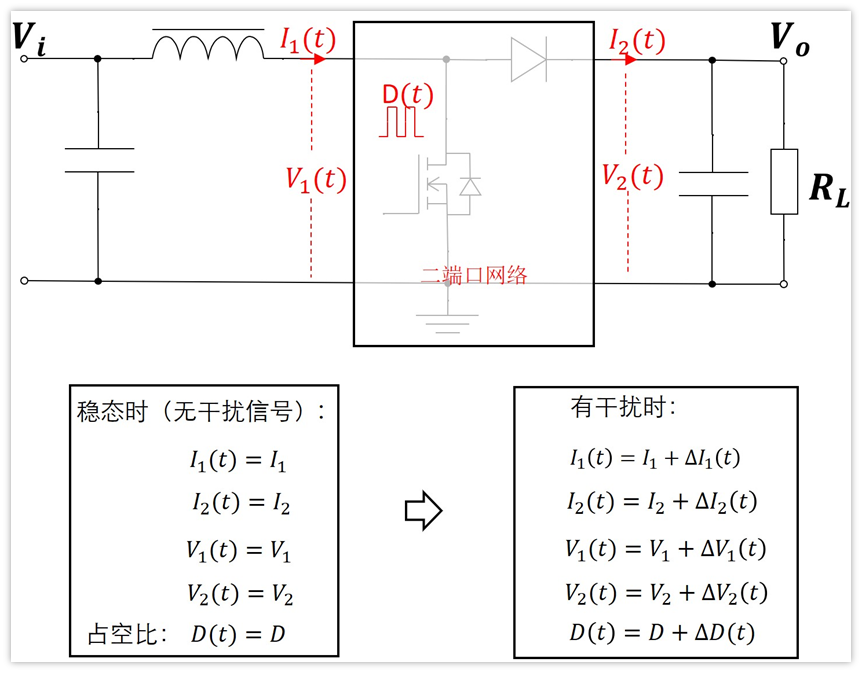
取的周期平均值我們用新符號表示,分別為:I1(t),I2(t),V1(t),V2(t),它們都是時間的函數。那么電路就變成了下面這樣:
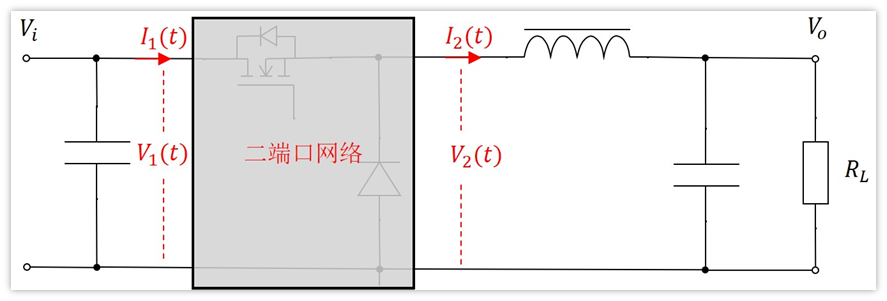
現在我們需要分析下我們引入二端口的4參數I1(t),I2(t),V1(t),V2(t),他們之間到底有啥恩怨情仇?
端口參數關系,推導出兩個式子
假如沒有任何干擾信號,那么I1(t),I2(t),V1(t),V2(t)周期平均值和全時間的平均值是一樣的,每個周期都一樣,每個周期的平均值自然和全部時間內的平均值一樣,這應該沒毛病。
好,我們假設沒有干擾信號時,平均值分別是I1,I2,V1,V2,它們是個常量。此時開關信號的占空比也是恒定的,我們用D表示。
現在我們將干擾信號加進去,我們知道,系統只有滿足小信號條件的時候,才能將之近似看成線性系統。
既然干擾信號是小信號,那么這個干擾信號會引起I1(t),I2(t),V1(t),V2(t)隨時間小范圍變化,它們分別以I1,I2,V1,V2為中心進行波動,同理,占空比也會圍繞D為中心進行波動。
各變量的波動量不就是交流小信號嗎?
我們分別用符號△I1(t),△I2(t),△V1(t),△V2(t),△D(t)來表示。
那么我們可以用下面的表達式進行表示:
式子已經列出來了,現在我們需要求他們之間的關系。
先看看V2(t)的物理意義,前面說了,它是開關周期內的平均值。
顯然,V2(t)=V1(t)*D(t),為什么呢?
因為在MOS不導通的時候,那么二極管導通,v2(t)為0,而在MOS導通的時候,v2(t)等于v1(t)。
所以,v2(t)在周期內的平均值V2(t)就等于導通時間的百分占比乘以V1(t),即:

同樣的,I1(t)= I2(t)*D(t),那又是為什么呢?
因為MOS在不導通的時候,i1(t)為0,而在MOS管導通的時候,i1(t)等于i2(t),所以,i1(t)在周期內的平均值I1(t) 就等于導通時間的百分占比乘以I2(t),即:

易知,上面兩個式子,無論是在穩態(沒有干擾),還是在有干擾的情況下,都是成立的。
小信號求解
我們把前面得到的幾個式子代換一下,就可以得到小信號的表達式。
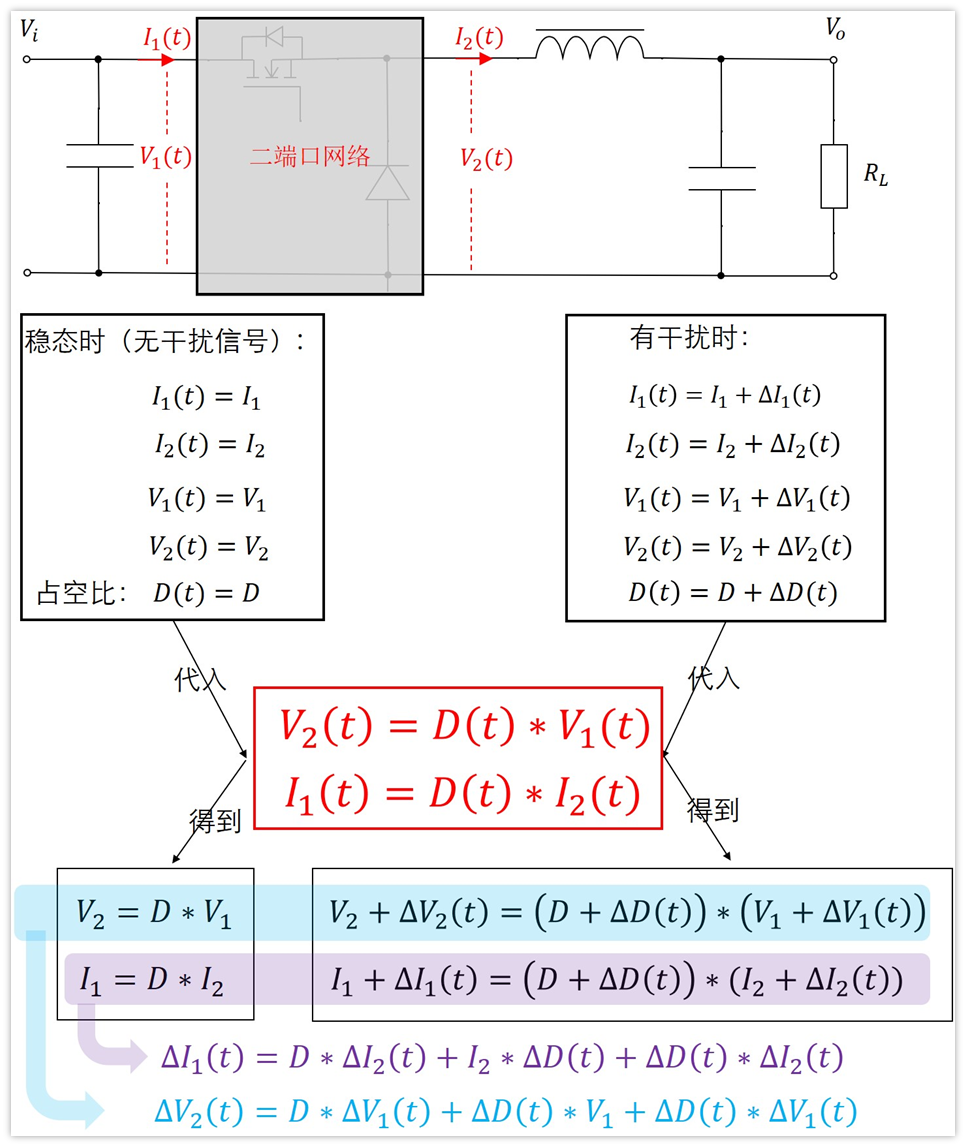
上面的式子可能看著有點復雜,其實簡單代換就出來了,最終我們得到了下面這兩個式子:
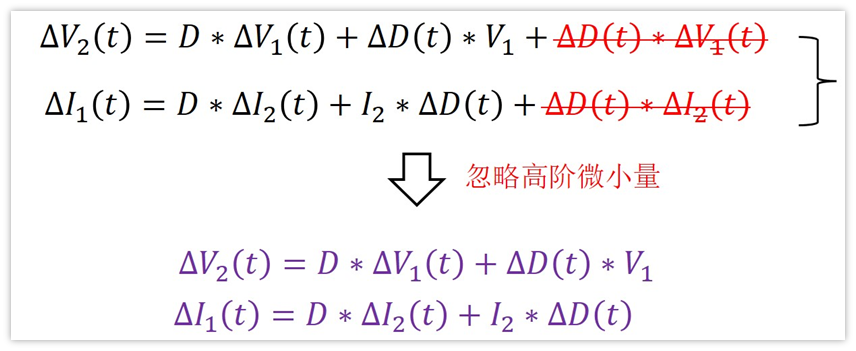
式子中忽略了高階微小量,為什么可以忽略呢?
我是這么理解的,本來這些帶△的量就是小信號,意思是圍繞一個中心值小范圍波動,所以帶△符號的量相對于不帶△符號的量是很小的。那么兩個都帶△符號的量相乘,乘積就更小了,所以干脆把它忽略掉了。
對于BUCK來說,只需要第一個式子就可以求出傳遞函數了,也就是下面這個

寫的有點長,我們回顧下我們最終的目的,我們的目的是要求出Gvd,也就是△Vo/△D的值,上面式子中,我們已經能知道△V2與△D的關系,那△V2與△Vo是什么關系呢?
回到我們Buck的拓撲
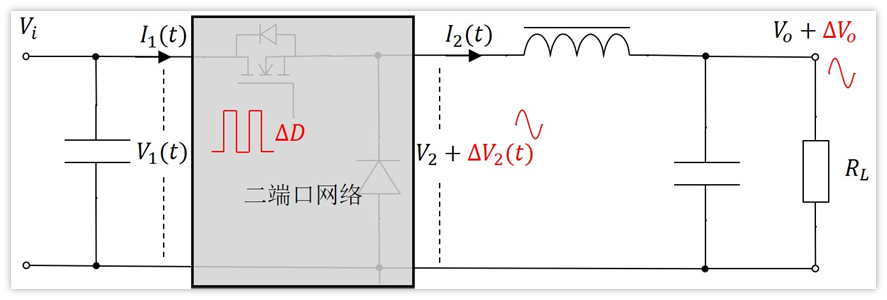
V1(t)不就是輸入信號Vi嗎?
理想情況下,Vi就是恒定的,占空比變化也不會導致Vi發生變化(不要考慮輸入的開關紋波,我們現在分析的是理想拓撲,輸入電源為理想電源,電壓就是恒定的)。
既然Vi恒定,那么V1(t)就恒定不變,那么前面說的V1(t)的變化量△V1(t)=0。所以上面的那個式子可以再次化簡下,如下:
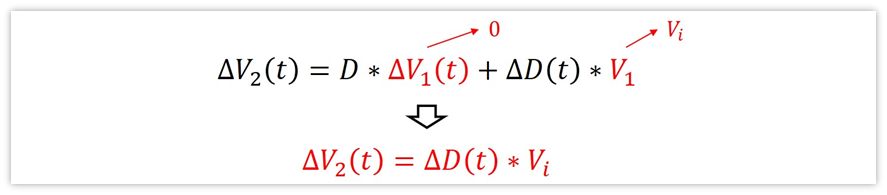
另一方面,△V2指的是在占空比發生變化時,在電感前面引起的電壓的變化量。
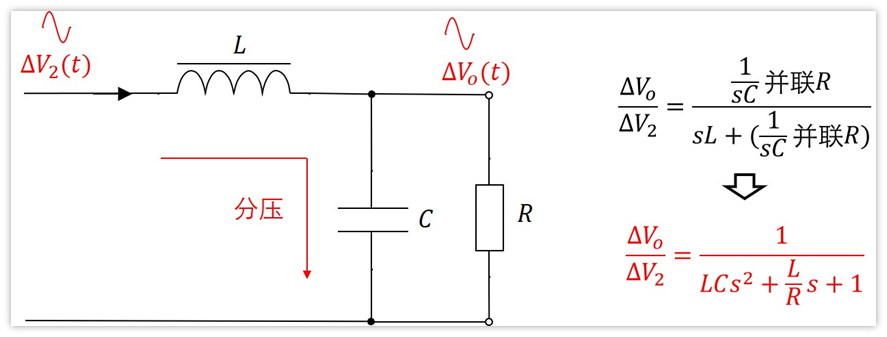
我們知道了△V2,那么△Vo不就是后面電感L,電容C,負載R對△V2的分壓嗎?那么就有了:
再結合前面得到的式子△V2=△D*Vi,我們就求得了最終的傳遞函數:
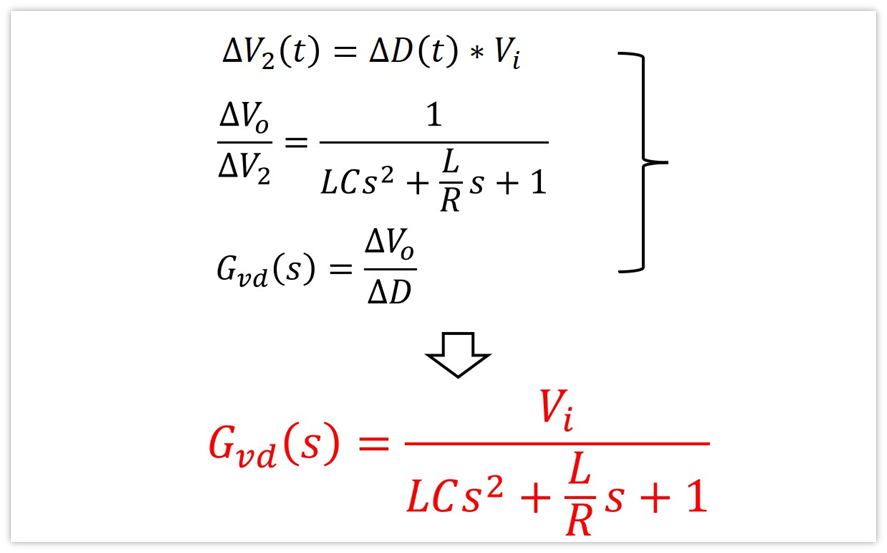
到此,我們就求出了buck的開關變換器的傳遞函數Gvd(s)。
寫到這里,我估計會有兄弟說:搞了一堆,我肉眼都能看出在電感之前的信號表達式△V2=△D*Vi,再把它后面的電感L,C,R看成是低通濾波器,1分鐘就能推出傳遞函數了。
確實如此,有點復雜,不過我上面的推導是普遍適用的法子,我拿BUCK來舉例其實不好。如果拿boost就比較好,因為boost肉眼看不出來,但用上面的法子就可以推導出來。
那下面就再看看Boost
Boost的CCM模式傳遞函數推導過程
有了前面的鋪墊,Boost我就寫簡單點,其實最關鍵的還是那個MOS和二極管,我們的過程依然是下面幾步。
1、二端口等效
2、端口參數關系,推導出兩個式子
3、代入電路,結合原理推導出傳遞函數
二端口等效
二端口等效如下:
端口參數關系,推導出兩個式子
I1(t),I2(t),V1(t),V2(t)為周期平均值,假如沒有任何干擾信號,它們和全時間的平均值是一樣的,每個周期都一樣,每個周期的平均值自然和全部時間內的平均值一樣,這應該沒毛病。
好,我們假設沒有干擾信號時,平均值分別是I1,I2,V1,V2,它們是個常量。此時開關信號的占空比也是恒定的,我們用D表示。
現在我們將干擾信號加進去,我們知道,系統只有滿足小信號條件的時候,才能將之近似看成線性系統。
既然干擾信號是小信號,那么這個干擾信號只會引起I1(t),I2(t),V1(t),V2(t)隨時間小范圍變化,它們分別以I1,I2,V1,V2為中心進行波動,同理,占空比也會圍繞D為中心進行波動。
各變量的波動量不就是交流小信號嗎?
我們分別用符號△I1(t),△I2(t),△V1(t),△V2(t),△D(t)來表示。
式子已經列出來了,現在我們需要求他們之間的關系。
先看看V1(t)的物理意義,它是周期內的平均值。
顯然,V1(t)=V2(t)*(1-D(t)),為什么呢?
因為在MOS不導通的時候,二極管(看成理想二極管)導通,v1(t)為v2(t),而在MOS導通的時候,v1(t)接GND,為0,所以,v1(t)在周期內的平均值V1(t)就等于不導通時間的百分占比乘以V2(t),即:

同樣的,I2(t)= I1(t)* (1-D(t)),那又是為什么呢?
因為MOS在不導通的時候,i2(t)等于i1(t),而在MOS管導通的時候,i2(t)等于0,所以,i2(t)在周期內的平均值I2(t) 就等于不導通時間的百分占比乘以i1(t),即:

從推導過程看,上面兩個式子,無論是在穩態(沒有干擾),還是在有干擾的情況下,都是成立的。
小信號求解
我們把前面得到的幾個式子代換一下,就可以得到小信號的表達式。
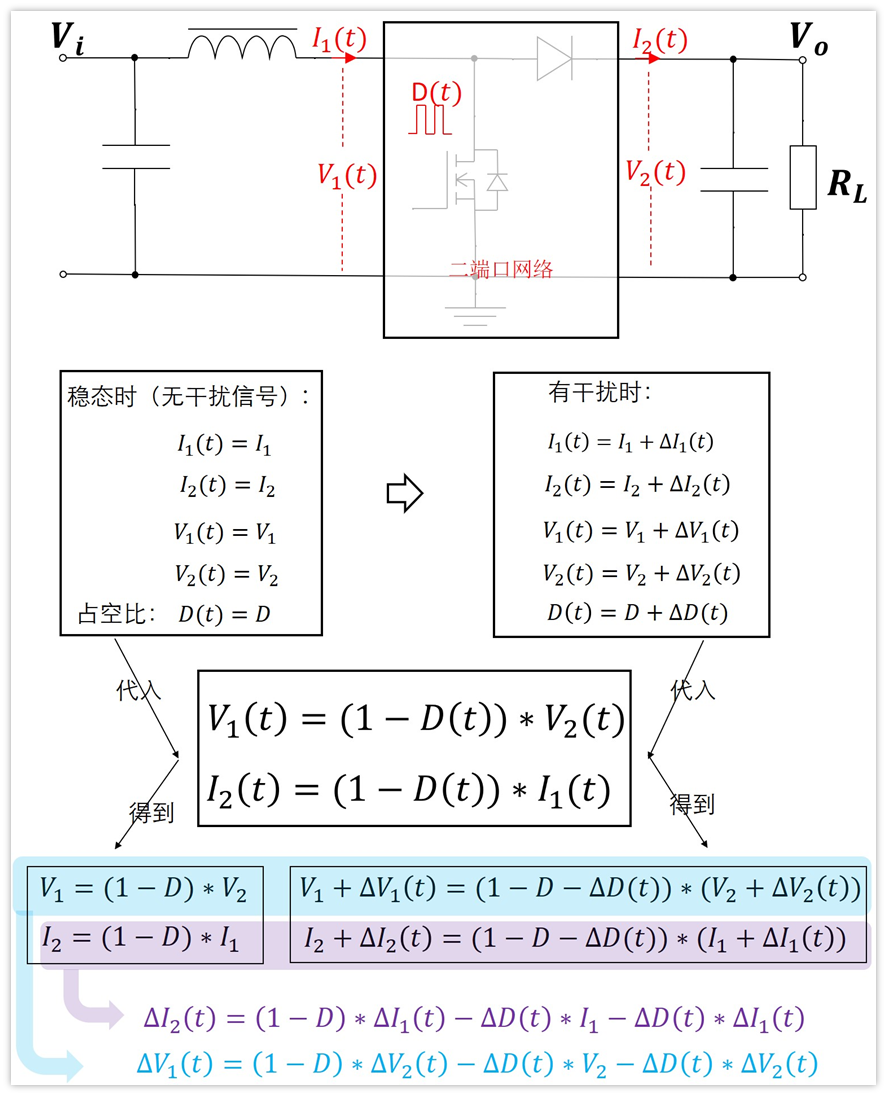
忽略高階小項,得到下面兩個小信號的式子:

回想我們的目的,我們要得到傳遞函數,也就是需要知道△Vo與△D的比值關系。當然,我們會有一些量是已知的,比如輸入Vi,占空比D,還有電感L,負載阻抗R,負載濾波電容C,這些都是已知量。
回到Boost的拓撲
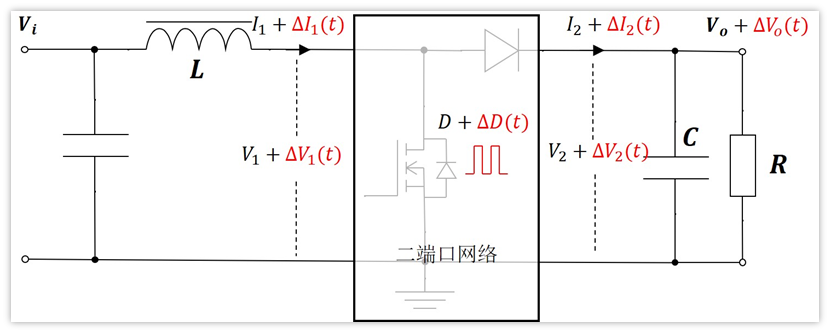
從上面我們能得到什么式子呢?
首先,在輸入端,對于交流小信號來說,輸入直流Vi相當于是短路,那么電感左邊相當于接地,根據復阻抗的歐姆定律,那么電感兩端壓降就是:sL*△I1(t),也等于-△V1(t),負號表示方向。

關于為什么“對于交流小信號來說,輸入直流Vi相當于是短路”的,我之前也寫過一篇文章,可以去瞅瞅。
其次,在輸出端,對于交流小信號來說,電壓△Vo=△V2,同時,根據復阻抗的歐姆定律,電壓等于電流乘以阻抗,即:

然后,V1為直流分量,因此有V1=Vi;
V2也為直流分量,因此有V2=Vo,I2=Vo/R
并且在小信號求解時,我們已經推出了兩個公式:
V1=(1-D)*V2;
I2=(1-D)*I1
我們把上述所有公式匯總,消除中間量,就可以求出傳遞函數了,如下圖:
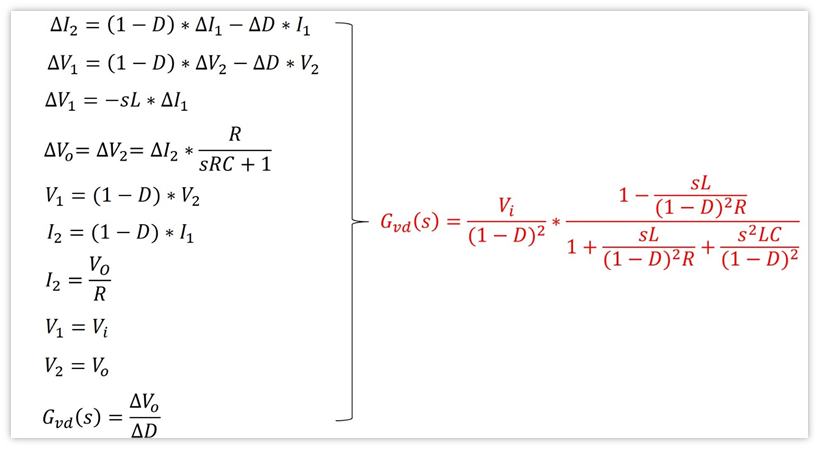
以上就是boost求解傳遞函數的過程,看著是非常費勁,其實要是想通了就不難。
小結
很是費了一番功夫,最終求出了buck和boost的傳遞函數Gvd(s)。
我使用的方法其實就是《開關變換器的建模與控制+張衛平編著》里面的開關網絡平均值法,不過我結合自己的喜好,改造了下,沒有用變壓器等效,盡量用通俗的語言,一步一步推出公式來。
當然,我這么玩不太嚴謹,如果想要深入了解的兄弟,建議去看下這本書,里面有很多建模方法,非常的專業。
但是不好的地方就是也比較難懂,我來來回回看了好久,終于有些許領悟,能做到扔掉書本,自己推出buck和boost的開關變換器的傳遞函數了,過程就是上面寫的了。
以上內容其實在工作中是用不到的,各種拓撲的傳遞函數其實早已被前人給推導出來了,我們直接用就好。不過,人總有一些好奇心,會問個為什么,如果知道過程,那自然也是極好的。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。

萬能遙控器相關文章:萬能遙控器代碼
藍牙技術相關文章:藍牙技術原理