- 1 引言
智能小車尋跡系統是基于攝像頭和飛思卡爾16微處理器mc9s12xs128組成,由攝像頭采集圖像有用信息送入單片機分析道路參數。
智能小車跑道表面為白色,中心有連續黑線作為引導線,黑線寬25mm,鋪設跑道地板顏色與背景不一樣;跑道寬度為60cm,窄道區的寬度為45cm;跑道最小曲率半徑不小于50 厘米; 跑道可以交叉,交叉角為90度。
系統主要包括視頻圖像采集、圖像處理、黑線中心提取、路徑判斷。
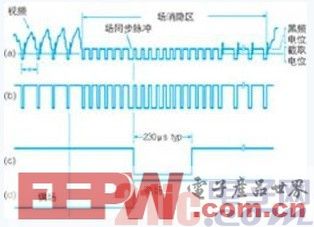
2 視頻圖像采集
圖像采集是基于mc9s12xs128單片機來實現的。mc9s12xs128
- 關鍵字:
飛思卡爾16 mc9s12xs128
飛思卡爾16介紹
您好,目前還沒有人創建詞條飛思卡爾16!
歡迎您創建該詞條,闡述對飛思卡爾16的理解,并與今后在此搜索飛思卡爾16的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473