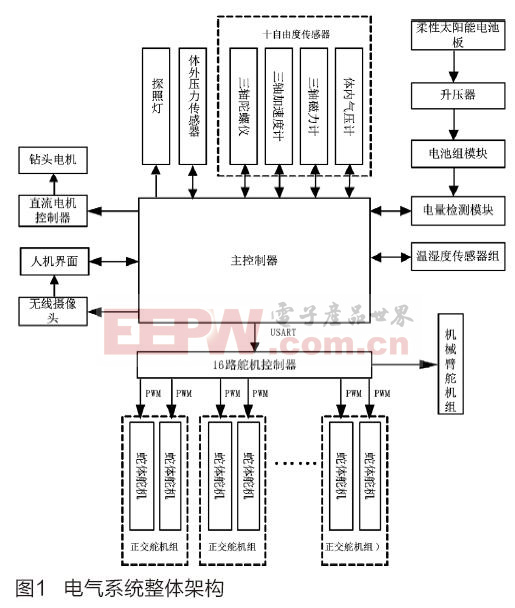
- 本文設計了一種可閉環控制的多功能水中蛇形機器人,主要解決現有無人潛水器不能進行運動姿態調整、續航能力低且功能較為單一的問題。蛇體內部裝有的三軸加速度計、三軸陀螺儀、三軸磁力計可用于實時采集蛇形機器人運動時的加速度大小和方向、轉向時的角速度和所處的方位,通過Kalman濾波算法對這九軸數據進行融合,可以得出機器人在行進時較為準確的航向角運動檢測和定位功能;蛇體外表面覆蓋有柔性太陽能電池板,可在電池電量不足時浮出水面進行充電;蛇體前端的可伸縮式機械臂、旋轉鉆頭和探照燈,可用于水中作業;蛇體內的無線攝像頭及多種
- 關鍵字:
蛇形機器人 人機界面 水中作業 十自由度傳感器 太陽能充電 201510
水中作業介紹
您好,目前還沒有人創建詞條水中作業!
歡迎您創建該詞條,闡述對水中作業的理解,并與今后在此搜索水中作業的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473