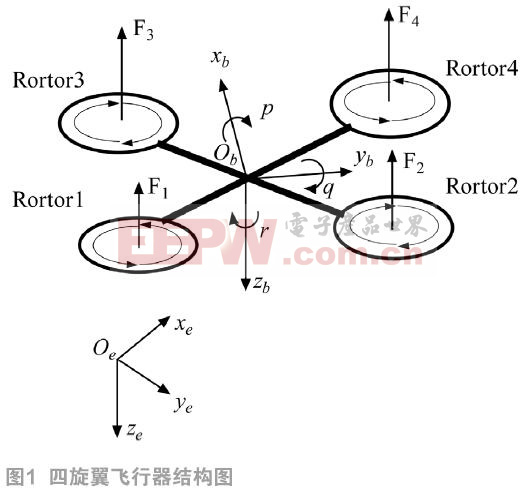
- 針對在參數變化、外部干擾條件下四旋翼飛行器的穩定飛行控制問題,本文提出了一種基于反步法的四旋翼飛行器增穩控制方法。首先,建立四旋翼飛行器的動態模型。其次,基于反步法設計的控制器用于飛行器姿態控制,采用模糊自適應PID控制器對飛行器的高度和位置進行控制,將兩者結合構成一個內環姿態和外環位置結構的雙閉環控制器,從而實現四旋翼飛行器的混合增穩控制。仿真和實際測試結果表明所設計的控制器能夠實現參數變化和外部干擾時的穩定控制。
- 關鍵字:
反步法 模糊自適應PID 飛行控制 四旋翼飛行器 穩定性 201809
模糊自適應pid介紹
您好,目前還沒有人創建詞條模糊自適應pid!
歡迎您創建該詞條,闡述對模糊自適應pid的理解,并與今后在此搜索模糊自適應pid的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473