工業(yè)控制 文章 最新資訊
利用一個ARM7處理器對無刷電機實施磁場定向控制
- 摘要: 在一個基于ARM7的單片機上實施合理的控制算法(如磁場定向控制),三相無刷電機的動態(tài)響應(yīng)性能將會變得像分開勵磁的直流電機一樣快速。這種控制方法使三相無刷電機可用于汽車、機器人、工業(yè)變頻器以及某些家電設(shè)備中的高端電機驅(qū)動器。本文主要介紹如何在一個ARM處理器產(chǎn)品上實現(xiàn)這些系統(tǒng)控制方案,該單片機含有先進的PWM生成和信號調(diào)節(jié)功能所需的外設(shè),避免了專用或混合處理器架構(gòu)所需的學(xué)習(xí)過程。 電機驅(qū)動能效不論提高多少,都會節(jié)省大量的電能,這就是市場對先進的電機控制算法的興趣日濃的部分原因。三相無刷電
- 關(guān)鍵字: ARM7 磁場 定向控制 工業(yè)控制 無刷電機 工業(yè)控制
錳鋅鐵氧體用氧化鐵的性能要求
- 1 引言 眾所周知,自上世紀(jì)90年代開始,世界軟磁鐵氧體生產(chǎn)中心逐漸轉(zhuǎn)移到中國。據(jù)統(tǒng)計,2000年全國軟磁鐵氧體產(chǎn)量約6萬噸[1]。國產(chǎn)軟磁鐵氧體在全球中低檔產(chǎn)品中占有很大比例,但在高檔產(chǎn)品中的市場分額遠低于日、歐等發(fā)達國家。其中,原材料對中國軟磁鐵氧體質(zhì)量的制約是顯而易見的。錳鋅鐵氧體原料中氧化鐵的重量百分比約為70%,所以要制造高檔錳鋅鐵氧體,氧化鐵原料必須滿足相應(yīng)的性能要求。我們結(jié)合生產(chǎn)實踐研究了氧化鐵理化性能對鐵氧體制造工藝和產(chǎn)品性能的影響,并總結(jié)出了氧化鐵應(yīng)滿足的性能指標(biāo)要求。 2 氧化鐵的生
- 關(guān)鍵字: APS 工業(yè)控制 錳鋅鐵 氧化鐵 工業(yè)控制
慕尼黑上海電子展、激光光電展覽開幕在即
- 隨著當(dāng)前全球范圍內(nèi)的能源緊張和節(jié)能環(huán)保意識的提高,全球都對新一代工業(yè)自動化產(chǎn)品和電子產(chǎn)品提出了更高的能耗要求。與此同時,中國將成為世界第一大能源消費國。能源危機無疑是中國發(fā)展的瓶頸。面對日益緊缺的能源,目前中國的能源浪費,已經(jīng)嚴(yán)重地威脅著我們未來的發(fā)展。安全與能源危機無疑是中國創(chuàng)建和諧社會的瓶頸。 3月21日至23日在上海新國際博覽中心舉行的第六屆慕尼黑上海電子展electronica & ProductronicaChina2007及第二屆慕尼黑上海激光、光電展LASE
- 關(guān)鍵字: 測量 測試 單片機 電源技術(shù) 工業(yè)控制 激光光電展覽 開幕 模擬技術(shù) 慕尼黑 汽車電子 嵌入式系統(tǒng) 上海電子展 通訊 網(wǎng)絡(luò) 無線 消費電子 工業(yè)控制
智能交通路口控制器的設(shè)計
- 摘 要:介紹了TCS-0602智能交通路口控制器的硬件結(jié)構(gòu)及軟件結(jié)構(gòu),該控制器首次將32位處理器和Uclinux操作系統(tǒng)應(yīng)用到智能交通領(lǐng)域,建立了一種開放式的軟硬件體系,目前支持五種交通控制算法,將在一些城市進行試運行。 關(guān)鍵詞:智能交通 路口控制器 MPC8245 Uclinux 近年來,隨著我國經(jīng)濟的發(fā)展,城市的交通擁擠問題日趨嚴(yán)重,因此提高城市路網(wǎng)的通行能力、實現(xiàn)道路交通的科學(xué)化管理迫在眉睫。智能交通系統(tǒng)(ITS)在這種背景下應(yīng)運而生[1]。 智能交通要求路口向控制中心實時提供圖像和數(shù)據(jù)信息,并
- 關(guān)鍵字: MPC8245 Uclinux 工業(yè)控制 路口控制器 智能交通 工業(yè)控制
用負(fù)阻原理設(shè)計高穩(wěn)定度VCO
- 摘 要:介紹了利用負(fù)阻原理、采用改進型克拉潑電路設(shè)計的高穩(wěn)定度LC壓控振蕩器(VCO),其頻率范圍為180MHz~210MHz。用ADS進行了仿真,最后給出了測量結(jié)果,實際表明它們是一致的。該電路采用相角補償,提高了頻率穩(wěn)定度,降低了相位噪聲。該方法設(shè)計簡單、調(diào)試方便、成本低。 關(guān)鍵詞:負(fù)阻 VCO 克拉潑電路 相位噪聲 壓控振蕩器(VCO)是鎖相環(huán)路的重要組成部分。隨著電子技術(shù)的發(fā)展,出現(xiàn)了許多集成的VCO芯片。考慮到高頻率穩(wěn)定度、低相噪的要求,這里采用Agilent公司生產(chǎn)的低噪聲晶體管
- 關(guān)鍵字: VCO 負(fù)阻 工業(yè)控制 克拉潑電路 相位噪聲 工業(yè)控制
基于MC9S12微控制器的發(fā)動機高能直接點火控制
- 摘 要:發(fā)動機高能直接點火系統(tǒng)需按點火順序、點火時刻和點火能量的要求實現(xiàn)各點火線圈的獨立控制。介紹了以MC9S12DP256微控制器為核心的電子控制單元的軟硬件系統(tǒng)設(shè)計。利用MCU的增強型捕捉定時器,將輸入捕捉與輸出比較功能相配合,滿足了6個點火線圈初級電路通斷電的復(fù)雜時序控制要求。該系統(tǒng)在某稀燃天然氣發(fā)動機的開發(fā)中進行了應(yīng)用,結(jié)果表明:在各種工況下,都能獲得可靠的點火。 關(guān)鍵詞:微控制器 增強型捕捉定時器 點火系統(tǒng) 隨著電子技術(shù)的發(fā)展及對發(fā)動機性能要求的提高,微機控制的電子點火系統(tǒng)逐漸取代
- 關(guān)鍵字: 點火系統(tǒng) 工業(yè)控制 微控制器 增強型捕捉定時器 工業(yè)控制
基于CAN總線的EV電控系統(tǒng)通信的設(shè)計與開發(fā)
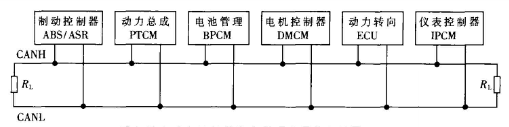
- 摘 要:以MC68376集成CAN控制器為例,闡述了純電動車(Electric Vehicle,簡稱EV)電控系統(tǒng)采用SAEJ1939通信協(xié)議實現(xiàn)CAN總線通信的設(shè)計要點,給出了基于CAN通信的動力蓄電池監(jiān)控系統(tǒng)的電池充放電特性曲線。實驗證明CAN總線通信速率高、準(zhǔn)確、可靠性高。?關(guān)鍵詞:電控系統(tǒng) CAN總線 通信 MC68376 隨著汽車上電子控制裝置越來越多,車身布線也愈來愈復(fù)雜,使得運行可靠性降低,故障維修難度加大。為了提高信號的利用率,要求大批數(shù)據(jù)信息能在不同的電控單元中共享,同時汽
- 關(guān)鍵字: 工業(yè)控制 工業(yè)控制
防腐電源智能監(jiān)控節(jié)點的設(shè)計
- 摘 要:介紹了一種防腐電源智能監(jiān)控節(jié)點的設(shè)計方法及相關(guān)的硬件電路,用以實現(xiàn)野外防腐電源的無人化監(jiān)控與檢測。研究了系統(tǒng)硬件結(jié)構(gòu)、信號調(diào)理電路以及有關(guān)芯片與微處理器的接口電路,闡述了監(jiān)控軟件的設(shè)計思路。試驗表明,該系統(tǒng)結(jié)構(gòu)簡單、成本低廉、性能可靠,能滿足工業(yè)現(xiàn)場的需要。 關(guān)鍵詞:防腐電源 監(jiān)控節(jié)點 單片機 金屬發(fā)生腐蝕的現(xiàn)象隨處可見。腐蝕給金屬材料造成的直接和間接損失是巨大的,以至造成災(zāi)難性的破壞事故,引起嚴(yán)重的環(huán)境污染。研究表明,因腐蝕造成的損失一般占國民生產(chǎn)總值的3%~4%,其中約有15%是
- 關(guān)鍵字: 單片機 防腐電源 工業(yè)控制 監(jiān)控節(jié)點 模擬IC 電源 工業(yè)控制
集裝箱CT檢測系統(tǒng)中控制子系統(tǒng)的研制
- 摘 要:簡要介紹了集裝箱CT檢測系統(tǒng)的原理,并詳細(xì)介紹了其中控制子系統(tǒng)的功能和結(jié)構(gòu)。實際試運行結(jié)果表明該系統(tǒng)運行穩(wěn)定、可靠。 關(guān)鍵詞:集裝箱CT檢測系統(tǒng) 控制系統(tǒng) PLC 集裝箱CT檢測系統(tǒng)是國家“十五”科技攻關(guān)計劃重點組織實施的項目,是針對我國目前的工業(yè)無損檢測、反恐形勢和反走私的實際需求而提出的。北京清華大學(xué)核研院在相繼成功研制了60Co集裝箱檢測系統(tǒng)和60Co鐵路貨運列車檢測系統(tǒng)之后,繼續(xù)承擔(dān)了這一國家重點科技攻關(guān)項目。控制子系統(tǒng)是60Co集裝箱CT檢測系統(tǒng)中的重要組成部分,對保證整個
- 關(guān)鍵字: PLC 工業(yè)控制 集裝箱CT檢測系統(tǒng) 控制系統(tǒng) 工業(yè)控制
旋挖鉆機數(shù)字控制系統(tǒng)
- 摘 要:介紹了一種專門為旋挖鉆機的垂直起豎和井深測量而設(shè)計的控制系統(tǒng)的原理、實現(xiàn)方法和軟硬件構(gòu)成等。該系統(tǒng)基于高性能八位微處理器Mega128而設(shè)計,集成了垂直度檢測、井深測量、垂直度控制和操作指示等功能。 關(guān)鍵詞:旋挖鉆機 電液比例控制 Mega128 PID PWM 旋挖鉆機是一種用于建筑基礎(chǔ)工程中成孔作業(yè)的施工機械。它是以履帶為支承的回轉(zhuǎn)斗式旋挖鉆孔機械,其工作裝置由動力頭、伸縮鉆桿、加壓裝置和液壓系統(tǒng)等組成。 旋挖鉆機的控制屬于一般工業(yè)自動化應(yīng)用領(lǐng)域,它要求一種廉價、節(jié)能、
- 關(guān)鍵字: Mega128 PID PWM 電液比例控制 工業(yè)控制 旋挖鉆機 工業(yè)控制
CAN總線在流光放電等離子體煙氣脫硫監(jiān)控系統(tǒng)中的應(yīng)用
- 摘 要:介紹了流光放電等離子體煙氣脫硫的原理和工藝流程,設(shè)計了一套基于CAN總線的微機監(jiān)控系統(tǒng),并給出了系統(tǒng)的軟硬件設(shè)計方案,在實驗平臺上取得了良好效果。 關(guān)鍵詞:CAN總線 流光放電等離子體 煙氣脫硫 監(jiān)控系統(tǒng) 隨著我國經(jīng)濟的發(fā)展,能源消費帶來的環(huán)境污染也越來越嚴(yán)重。燃煤煙氣中排放的二氧化硫和氮氧化物占全國總排放量的90%[1],是造成大氣污染、酸雨和溫室效應(yīng)的主要根源。目前世界上比較先進的煙氣脫硫(Flue Gas Desulphurization,FGD)技術(shù)中比較典型的方法有濕式石灰
- 關(guān)鍵字: CAN總線 工業(yè)控制 監(jiān)控系統(tǒng) 流光放電等離子體 煙氣脫硫 等離子顯示 PDP 工業(yè)控制
機器人實時遠程控制系統(tǒng)及其開發(fā)庫的設(shè)計與實現(xiàn)
- 摘 要:以實時性、可靠性為前提,設(shè)計了一套機器人遠程控制系統(tǒng)。介紹了其中的遠程控制平臺和本地控制系統(tǒng)的結(jié)構(gòu)及其關(guān)鍵技術(shù);機器人遠程控制系統(tǒng)開發(fā)庫的設(shè)計與實現(xiàn);展示了開發(fā)實例。 關(guān)鍵詞:機器人遠程控制系統(tǒng) 遠程控制平臺 本地控制系統(tǒng) 自適應(yīng)視頻傳輸方案 開發(fā)庫 近年來,隨著無線網(wǎng)絡(luò)技術(shù)的發(fā)展和日益成熟,利用WLAN和LAN的混和組網(wǎng),使基于網(wǎng)絡(luò)的機器人遠程控制成為一個熱門的研究領(lǐng)域。 本文設(shè)計了一套移動機器人遠程控制系統(tǒng)。該系統(tǒng)可用于如時延網(wǎng)絡(luò)環(huán)境下控制系統(tǒng)的穩(wěn)定性理論、實時控制系統(tǒng)
- 關(guān)鍵字: 本地控制系統(tǒng) 工業(yè)控制 機器人遠程控制系統(tǒng) 遠程控制平臺 自適應(yīng)視頻傳輸方案 工業(yè)控制
基于CCP協(xié)議利用CANape進行電控單元標(biāo)定
- 摘 要:采用基于CAN總線的匹配標(biāo)定協(xié)議,對汽車控制器局域網(wǎng)絡(luò)中的電子控制單元進行匹配標(biāo)定。分析了CCP協(xié)議用于標(biāo)定的工作機理,討論了利用CANape進行基于CCP標(biāo)定的實現(xiàn)方法,闡述了如何生成CANape與控制器底層程序的軟件接口及具體標(biāo)定流程。實際應(yīng)用結(jié)果表明,這種方法可以快速有效地實現(xiàn)對汽車網(wǎng)絡(luò)中各控制器的匹配標(biāo)定。 關(guān)鍵詞:汽車電控單元 CAN總線 CCP協(xié)議 標(biāo)定 CANape 目前基于CAN(Controller Area Network)總線的分布式系統(tǒng)在汽車電子領(lǐng)域得到廣泛應(yīng)用,電子控
- 關(guān)鍵字: CANape CAN總線 CCP協(xié)議 標(biāo)定 工業(yè)控制 汽車電控單元 工業(yè)控制
亞線程和動態(tài)亞線程樹的設(shè)計與研究
- 摘 要:提出了一種對線程進行合理分組的方法,即亞線程技術(shù),并提出了動態(tài)亞線程樹的設(shè)計思想和運行機制。 關(guān)鍵詞:多線程 亞線程 動態(tài)亞線程 多線程是近年來非常流行的一項編程技術(shù)。尤其是在網(wǎng)絡(luò)傳輸和資源共享軟件的設(shè)計中,在多媒體的采集和處理、并行計算、并行處理等方面,更是由于高效性和可靠性要求而使線程技術(shù)得到廣泛使用。多線程技術(shù)保證了程序模塊間的分離度,而且可通過合理劃分功能模塊而減少通信量,實現(xiàn)廣泛的數(shù)據(jù)共享,從而使系統(tǒng)性能得到很大提高。 但是,隨著線
- 關(guān)鍵字: 動態(tài)亞線程 多線程 工業(yè)控制 亞線程 工業(yè)控制
基于RTX51的排爆機器人嵌入式控制器固件開發(fā)
- 摘 要:介紹遙操作排爆機器人PBJ-1的嵌入式控制系統(tǒng)研制情況。敘述了利用RTX51開發(fā)排爆機器人嵌入式控制系統(tǒng)固件中的一些問題和解決辦法。實踐證明基于嵌入式實時操作系統(tǒng)RTX51開發(fā)工作于非結(jié)構(gòu)環(huán)境中的遙操作機器人控制系統(tǒng)可以有效地提高整個機器人系統(tǒng)的性能及開發(fā)效率。 關(guān)鍵詞:排爆機器人 實時操作系統(tǒng) 微控制器 RTX51 排爆機器人(EOD robot)是一種遙操作地面移動機器人,操作機主體一般是由一個機械手和一個可移動平臺組成,主要用于拆
- 關(guān)鍵字: RTX51 工業(yè)控制 排爆機器人 實時操作系統(tǒng) 微控制器 工業(yè)控制
工業(yè)控制介紹
工業(yè)控制自動化主要包含三個層次,從下往上依次是基礎(chǔ)自動化、過程自動化和管理自動化,其核心是基礎(chǔ)自動化和過程自動化。
工業(yè)控制網(wǎng)絡(luò)將向有線和無線相結(jié)合方向發(fā)展
計算機網(wǎng)絡(luò)技術(shù)、無線技術(shù)以及智能傳感器技術(shù)的結(jié)合,產(chǎn)生了“基于無線技術(shù)的網(wǎng)絡(luò)化智能傳感器”的全新概念。這種基于無線技術(shù)的網(wǎng)絡(luò)化智能傳感器使得工業(yè)現(xiàn)場的數(shù)據(jù)能夠通過無線鏈路直接在網(wǎng)絡(luò)上傳輸、發(fā)布和共享。無線局域網(wǎng)技術(shù)能夠在工廠環(huán)境下, [ 查看詳細(xì) ]
工業(yè)控制電路

工業(yè)控制相關(guān)帖子
工業(yè)控制資料下載
工業(yè)控制視頻


工業(yè)控制專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司