- 摘要:針對現有小型無人機導航系統的解算速度慢、多處理器核心臃腫可靠性差的缺點,實現了一種僅使用單一FPGA作為數據處理核心的小型高速導航解算系統。該系統對飛機運動方程組和導航方程組進行并行化分解,對相互獨
- 關鍵字:
并行計算 FPGA 姿態解算 導航解算
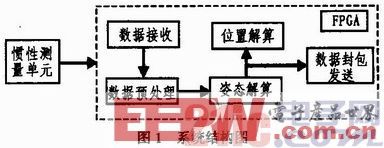
- 摘要:針對現有小型無人機導航系統的解算速度慢、多處理器核心臃腫可靠性差的缺點,實現了一種僅使用單一FPGA作為數據處理核心的小型高速導航解算系統。該系統對飛機運動方程組和導航方程組進行并行化分解,對相互獨立的中間變量進行并行計算,使得單個運算周期能夠同時進行6次浮點運算,在不盲目增加硬件消耗的條件下有效提高了解算速度。仿真和實驗結果表明系統能夠高效地進行導航信息解算,在小型無人機的導航控制領域有重要的工程應用價值。
導航解算是小型無人機導航控制的基礎,小型無人機機動性強,為了完成自主導航任務,必
- 關鍵字:
FPGA 姿態解算 導航解算
導航解算介紹
您好,目前還沒有人創建詞條導航解算!
歡迎您創建該詞條,闡述對導航解算的理解,并與今后在此搜索導航解算的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473