旋轉(zhuǎn)狀態(tài)下動(dòng)態(tài)傾角測(cè)量系統(tǒng)設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
0引 言
本文引用地址:http://www.104case.com/article/89854.htm基于MEMS加速度計(jì)的傾角測(cè)量模塊具有體積小、質(zhì)量輕、成本低、抗沖擊、可靠性高等優(yōu)點(diǎn)。對(duì)有加速度干擾下的傾角測(cè)量存在較大誤差,本文圍繞這一誤差產(chǎn)生的來(lái)源和去除這種誤差的方法進(jìn)行了研究。
旋轉(zhuǎn)狀態(tài)下的傾角測(cè)量屬于有加速度干擾的動(dòng)態(tài)傾斜角度測(cè)量的一種。在旋轉(zhuǎn)參考系下,質(zhì)量為m的物體受到指向旋轉(zhuǎn)中心的連接物的牽引力,但卻相對(duì)于該參考系靜止,沒(méi)有加速度,不符合牛頓第一定律。所以,相對(duì)于慣性系作勻速轉(zhuǎn)動(dòng)的參考系也是非慣性系,要在這種參考系中保持牛頓第二定律形式不變,在質(zhì)點(diǎn)靜止于此參考系的情況下,應(yīng)引入離心慣性力,該力與旋轉(zhuǎn)軸垂直。該狀態(tài)下影響被測(cè)對(duì)象傾斜角度正確輸出的加速度正是該力造成的。為了抵消這種在旋轉(zhuǎn)狀態(tài)下由于加速度引起的誤差,本文介紹了5種不同的實(shí)現(xiàn)方案,并比較了各自的優(yōu)缺點(diǎn)。
1動(dòng)態(tài)傾角測(cè)量系統(tǒng)的構(gòu)建
1.1 單軸/雙軸加速度計(jì)和直流電機(jī)方案
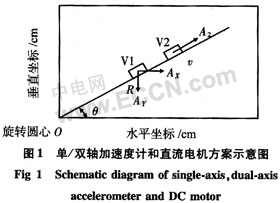
如圖1所示,V1為雙軸加速度計(jì),V2為單軸加速度計(jì)。V1為直流電機(jī)的負(fù)載,通過(guò)控制算法使AY的輸出值始終向-1.0gn無(wú)限靠近(與重力加速度同向),此時(shí),與AY垂直的AX軸的輸出剛好為向心加速度-a。V2的輸出值為
此方法最大的優(yōu)點(diǎn)就在于理論上簡(jiǎn)單,易于理解,對(duì)數(shù)據(jù)處理算法要求不高。但這種方法由于使用電機(jī)驅(qū)動(dòng),會(huì)增大功耗;由于需要編寫控制算法或使用專門的控制單元,會(huì)增大系統(tǒng)設(shè)計(jì)和調(diào)試的復(fù)雜性以及硬件開發(fā)成本,不易滿足實(shí)時(shí)性要求,總體可行性不強(qiáng)。
1.2 2只單軸加速度計(jì)方案
如圖2所示,其中,V1與旋轉(zhuǎn)中心的距離為R,V2與旋轉(zhuǎn)中心的距離為R+r,V1與V2的敏感軸在同一直線上。靜態(tài)測(cè)量時(shí)
AX=gsinθ
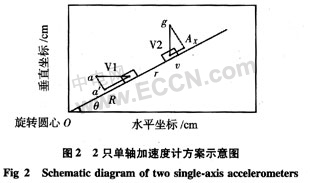
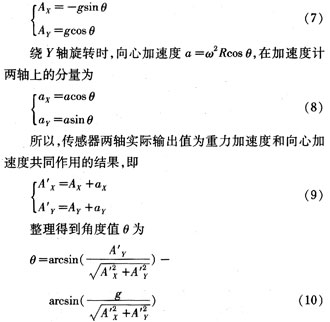
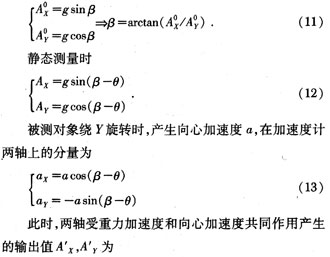
當(dāng)被測(cè)對(duì)象繞Y軸旋轉(zhuǎn)時(shí),產(chǎn)生與被測(cè)對(duì)象夾角為θ的水平面上的向心加速度,方向指向Y軸,大小為a=ω2T,此時(shí),V1,V2兩加速度計(jì)處的向心加速度的大小為

由于過(guò)高g值(幾十gn)的加速度計(jì)不適合檢測(cè)傾斜角度,但過(guò)低的g值(小于0.5gn)又會(huì)導(dǎo)致當(dāng)旋轉(zhuǎn)角速度增加時(shí)會(huì)迅速使加速度計(jì)輸出量達(dá)到非線性范圍,甚至超出量程。故選取低g值加速度傾角傳感器,如VTI公司生產(chǎn)的單軸加速度傾角傳感器。
上述方案中,當(dāng)θ=0°且以最高角速度旋轉(zhuǎn)時(shí),遠(yuǎn)離旋轉(zhuǎn)軸的V2會(huì)首先超出量程范圍,所以,為保證兩傳感器在量程范圍內(nèi)工作,V1,V2相對(duì)于旋轉(zhuǎn)軸的絕對(duì)位置要盡量小,并在允許的范圍內(nèi),要盡量增大V1,V2之間的相對(duì)位置r,以使測(cè)量系統(tǒng)能夠充分敏感出兩位置由于所做圓周運(yùn)動(dòng)的半徑不同而引起兩傳感器輸出值的差別。
由于運(yùn)用2只加速度計(jì)且需要相隔一定的距離,所以,該方案的缺點(diǎn)是不利于硬件制作的小型化。
1.3雙軸加速度計(jì)方案
如圖3所示,靜態(tài)測(cè)量時(shí)
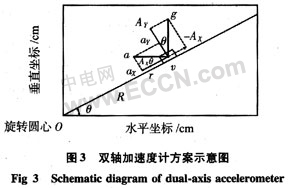
此方案運(yùn)用1只雙軸加速度計(jì),相對(duì)于2只單軸加速度計(jì)方案,克服了不利于硬件制作小型化的缺點(diǎn);但此方案的缺點(diǎn)在于可能使加速度計(jì)兩軸工作在輸出特性不同的區(qū)向(例如X軸工作在線性度和分辨力較高的區(qū)間,而Y軸工作在線性度和分辨力相對(duì)較差的區(qū)間),會(huì)使該系統(tǒng)在整個(gè)量程范圍(-15°<θ<+15°,ω≤100°/s)內(nèi)的精度降低,穩(wěn)定性總體不高。
1.4可減小零位誤差的雙軸加速度計(jì)方案
安裝1只雙軸加速度計(jì)如圖4所示。AX軸與被測(cè)對(duì)象夾角為β。其中,β的具體數(shù)值與當(dāng)被測(cè)對(duì)象絕對(duì)零度時(shí),兩敏感軸的輸出有關(guān),即

此方案為雙軸加速度計(jì)方案的一般化情況,在保證了硬件制作小型化的同時(shí),通過(guò)調(diào)整加速度模塊與被測(cè)對(duì)象的安裝角度,可以使加速度計(jì)兩軸盡量工作在相同的輸出特性區(qū)間范圍內(nèi),對(duì)于提高測(cè)量系統(tǒng)的穩(wěn)定性,尤其在減小零位誤差方面十分有益。
這種方法可以適合一類環(huán)境下的應(yīng)用,但是如果對(duì)傳感器提出更高的要求(如,傾角測(cè)量范圍增大,對(duì)象旋轉(zhuǎn)速度更快),還是有可能使傳感器兩軸的工作范圍不盡如人意,即便此時(shí)通過(guò)調(diào)整安裝角度,能夠使兩軸的輸出特性相似,但不一定可以保證兩軸都工作在各自線性度好、分辨力高的區(qū)間。
1.5可任意設(shè)置夾角的雙軸加速度計(jì)方案
此方案為雙軸加速度計(jì)方案的更一般化改進(jìn),針對(duì)某種特定場(chǎng)合的應(yīng)用,可以選取2只單軸加速度計(jì),將二者安裝在同一位置,二者之間的夾角與二者與被測(cè)對(duì)象之間的夾角,甚至兩加速度計(jì)的量程,都可以根據(jù)該種場(chǎng)合自由任意設(shè)置,只要根據(jù)物理幾何關(guān)系熱傳導(dǎo)出的計(jì)算公式滿足單值對(duì)應(yīng)(系統(tǒng)中2只加速度計(jì)敏感軸的輸出值的每一種組合都對(duì)應(yīng)著唯一的一個(gè)角度值)即可。通常選取線性度最好的區(qū)域和輸出最敏感的區(qū)域。
此方案非常靈活,但須準(zhǔn)確建立被測(cè)對(duì)象的物理模型。
2系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
根據(jù)上述5種思路,構(gòu)建旋轉(zhuǎn)狀態(tài)下傾角測(cè)量系統(tǒng),該系統(tǒng)結(jié)構(gòu)如圖5所示。

其中,sensor_A和sensor_B表示測(cè)量系統(tǒng)包含的2個(gè)分量(對(duì)于2只單軸加速度計(jì)方案為2只單軸加速度計(jì);對(duì)于雙軸加速度計(jì)方案,為雙軸加速度計(jì)兩相互垂直的敏感軸),這里,分別選用VTI公司的SCA61T-FAHH1G(±0.5gn)和SCA100T-D02(±1.0gn)2個(gè)系列的傳感器;圖中為了使采集到的2個(gè)分量數(shù)據(jù)為同一時(shí)刻的數(shù)值,這里,采用16位高精度同步采集模數(shù)轉(zhuǎn)換器AD7654,該A/D轉(zhuǎn)換器可以同時(shí)采集選定的2個(gè)通道的數(shù)據(jù),從理論上保障了參與運(yùn)算的兩路數(shù)據(jù)的并發(fā)性;考慮到目前只須將采集到的數(shù)據(jù)經(jīng)濾波處理后送上位機(jī)進(jìn)行擬合插值,所以,選擇8位RISC精簡(jiǎn)指令集的Atmega128單片機(jī)即可滿足要求;單片機(jī)與上位機(jī)的數(shù)據(jù)通道采用串口通信。對(duì)于這2個(gè)方案,選取R=30cm,r=10 cm。
3數(shù)據(jù)采集與誤差分析
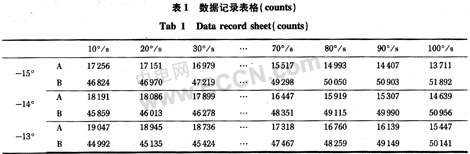
實(shí)驗(yàn)中,采用TZS-74IIA型陀螺儀表綜合試驗(yàn)轉(zhuǎn)臺(tái),在轉(zhuǎn)速為0°/s~100°/s(間隔10°/s)下分別采集與水平夾角為-15°~+15°范圍內(nèi)的角度輸出,如表1。(表中數(shù)據(jù)為A/D轉(zhuǎn)換器輸出數(shù)值,counts)
以上數(shù)據(jù)分別以每3°和每5°為間隔作為已知樣本點(diǎn),利用Matlab中提供的二維一般分布數(shù)據(jù)的插值函數(shù)z=griddata(X0,Y0,Z0,x,y,'方法')進(jìn)行插值運(yùn)算,(X0,Y0,Z0為已知樣本集合;x,y為新的插值點(diǎn),這里,選擇上表中把作為已知樣本點(diǎn)以外的點(diǎn)作為新的插值點(diǎn);z為插值結(jié)果;方法包括:linear,cubic,nearest,v4),并繪制誤差的三維曲面。圖6~圖9中,X,Y軸表示傾角測(cè)量系統(tǒng)中兩分量經(jīng)A/D轉(zhuǎn)換后輸出的數(shù)字量,單位:counts。
根據(jù)試驗(yàn)結(jié)果可知,隨著已知插值樣本點(diǎn)密度的增大,誤差逐漸減小,同時(shí),在Matlab提供的4種插值方法中,li-near和v4的效果最好,cubic次之,nearest最差;且雙軸加速度計(jì)方案的效果遠(yuǎn)不如2只單軸加速度計(jì)方案。
4結(jié)論
提出了5種抵消基于MEMS加速度計(jì)的傾角測(cè)量系統(tǒng)在旋轉(zhuǎn)狀態(tài)下所產(chǎn)生的誤差的方法。所有方案角度計(jì)算公式復(fù)雜度相同,且均滿足傳感器的每一組輸出對(duì)應(yīng)唯一的一個(gè)角度值,故這幾種方法均具備很高的可行性。根據(jù)試驗(yàn)結(jié)果得出:對(duì)于角度范圍和轉(zhuǎn)速不高的應(yīng)用場(chǎng)合,雙軸加速度計(jì)方案有一定使用價(jià)值;而針對(duì)大角度范圍、高轉(zhuǎn)速的情況下,2只單軸加速度計(jì)方案的優(yōu)勢(shì)比較明顯。

評(píng)論