激光敵我識別系統的分析與設計

激光敵我識別就是利用激光通信系統作為密碼收發器的敵我識別方式。目前,世界上許多國家都在大力開發這種提高敵我識別效能的技術。在我國,由于武器裝備中光電儀器研制進程較慢,長期以來,敵我識別尚是一項空白。為了提高我國的綜合國力,適應現代戰爭的發展和需要,研制有效的敵我識別系統已經受到軍方重視,并列為國家重點項目。同時,由于近幾年國內的激光技術發展迅猛,相對于紅外和毫米波等其它技術較為成熟,因此考慮利用激光目標識別和通信技術實現敵我識別這一方案。
本文引用地址:http://www.104case.com/article/89603.htm總體結構
激光目標識別系統總體結構框圖如圖1所示。
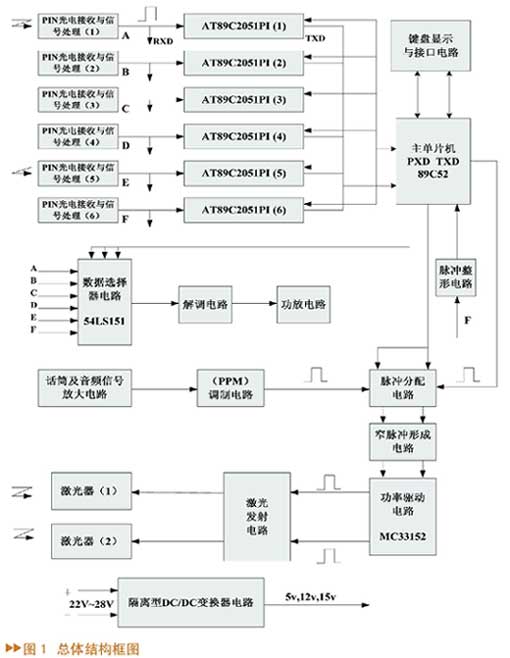
首先,通過兩個半導體激光器與控制電路驅動所產生的激光脈沖,經兩個光軸互相平行的光學系統準直后,作為目標識別與通信系統的載波信號。全方位PIN激光接收電路系統由五路相同的廣角PIN激光接收機組成,它接收到的激光脈沖信號,經放大及信號處理后,送給主機控制系統。在整個過程中,系統的各項功能都在主單片機控制下完成。六路子單片機AT89C2051分別用來處理來自五路PIN激光接收和APD定向接收的數字信息,完成數字通信中的譯碼與糾錯碼功能,并實現六路子機與主單片機之間的串行通信。
在目標識別與數字通信工作狀態時,兩個激光器發射的是經編碼的激光脈沖,以擴大光斑和提高發射激光脈沖能量。識別方首先以數字通信方式向被識別方發射密碼,當對方的全方位PIN光電接收機接收到啟動轉鏡的密碼后,由主單片機控制角反射鏡轉動,進行光波調制,然后發射載波回波信號。最后由主機進行回波信號特征識別,以達到辨別目標的目的。
在語音通信工作狀態時,兩個激光器交替發射經過主機控制的PPM調制激光脈沖,以增加載波頻率,此時,APD目標回波探測系統具有定向語音和數字通信功能。廣角PIN激光接收電路系統完成全方位激光脈沖的接收與處理功能,其中的五路PIN接收系統構成正前、左前、右前、左后和右后五個接收方位。主機控制系統控制激光發射、選擇接通話路以及鍵盤控制和顯示等各個功能。
激光發射系統
本系統采用半導體激光器作為光源,它光束質量好、能量高度集中、峰值輻射功率高、方向性好,此外體積小,可通過電源直接迅速調制,所以用半導體激光器可以使光源部分做得很小。但是半導體激光器的重復頻率較低,很難滿足語音通信的要求,為此,采用兩個激光器輪流發射的工作方式從而使重復頻率提高一倍。
另外,在發射系統中有目標識別、數字通信和語音通信三種工作狀態。在目標識別和數字通信狀態時,采用脈沖編碼方式,激光器同時發射重復頻率為1.25kHz的激光載波;在語音通信狀態時,采用頻率插補的交替發射方式,發射激光載波的重復頻率提高一倍,為2.5kHz。
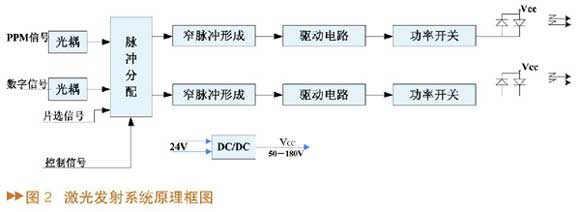
激光發射系統由脈沖分配與控制電路,窄脈沖產生電路,功率驅動,功率開關電路以及DC/DC變換電路等組成。通過調制器把模擬信號或數字信號疊加在激光器發射的光源上,信號光脈沖經光學系統聚焦、準直之后作為詢問信號發到自由空間傳播,完成一個激光發射過程。如圖2所示。
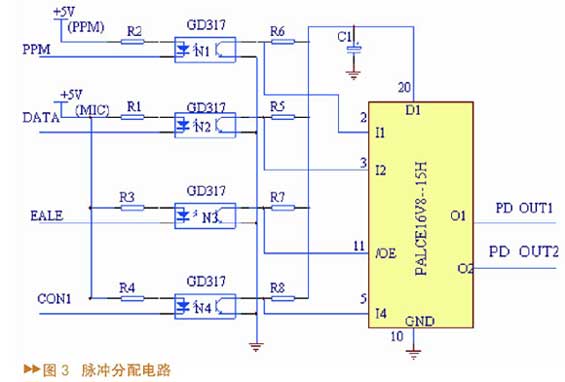
脈沖分配電路設計
脈沖分配電路(電路設計見圖3)在控制信號作用下有兩種工作狀態:在語音通信狀態,經光電耦合器隔離的PPM信號被2分頻,分別作為兩路激光器窄脈沖形成電路的驅動脈沖信號;在數字通信狀態,編碼的數字脈沖信號被同時分配給兩路窄脈沖形成電路。窄脈沖形成電路在輸入信號的下降沿作用下,產生滿足激光器要求的120-150ns的窄脈沖。該窄脈沖作為驅動電路的輸入,由驅動電路進行信號功率放大,以便滿足驅動功率開關管IRF450的要求;在目標識別狀態,由主機控制輸出編碼激光脈沖。來自主機的控制信號控制激光發射電路的工作狀態。
激光發射電路設計
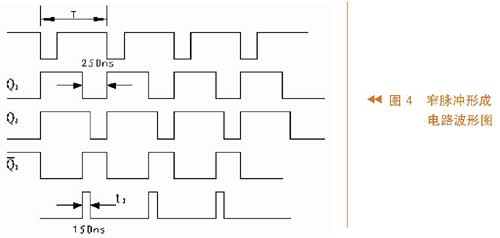
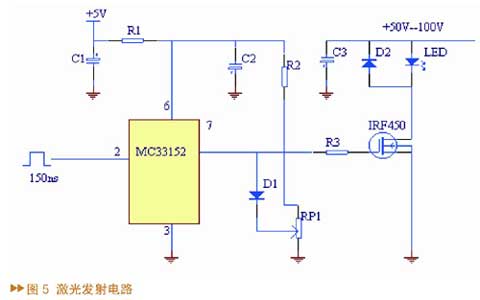
窄脈沖形成電路(波形圖見圖4)由不可重復再觸發單穩態觸發器54LS221和門電路等組成。由MC33152P高速雙場效應晶體管驅動器構成驅動電路。它是專門為需要用TTL電平驅動具有高轉換速率、大容性負載的場合設計的,輸入可與TTL、CMOS電平兼容,兩個大電流推挽輸出特別適合于驅動大功率的MOSFET。電路內部具有兩個獨立的1.5A推挽輸出通道,當負載電容為1000pF時,輸出上升和下降時間為15ns。
采用高速VMOS場效應管IRF450作為功率開關驅動半導體激光器發射激光,它與傳統的高速可控硅功率驅動電路相比,具有體積小,驅動電路簡單等優點。IRF450主要參數:IDmax=52A,VDS=450V,tr<30ns。激光器要求驅動電壓180V、工作電流40A左右。激光發射電路如圖5所示。
激光電源設計方法
當兩個激光器同時發射時,瞬時峰值電流達80A以上,因此,激光發射電路是整機的主要干擾源。主要以輻射和傳導等形式干擾其它電子電路,特別是通過供電系統對模擬電路形成干擾。為提高抗干擾能力,激光器的供電電路采取了隔離與濾波等措施,原理框圖如圖6所示。
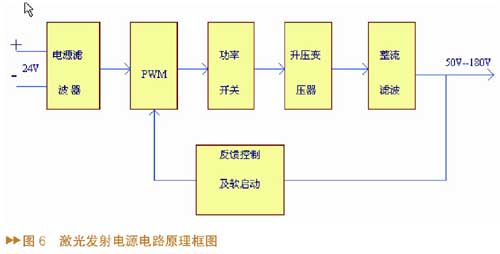
對于激光電源平均功率的估算,考慮留有一定余量,設單個激光器最高重復頻率為1.25kHz,脈寬為150ns,峰值電流ID=50A。對于電源輸出平均功率,考慮需留有一定余量,要求DC/DC變換器輸出功率為10W。為減小尖峰脈沖干擾,DC/DC變換電路輸入和輸出均經電源濾波器濾波。
APD回波信號探測系統
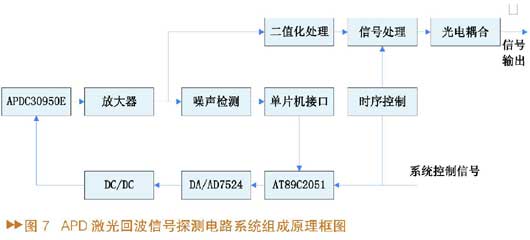
APD回波信號探測技術廣泛應用于激光測距、激光通信、激光雷達、激光敵我識別等領域。其原理框圖如圖7所示。經接收光學系統匯聚到APDC30950E上的激光回波信號,由視頻放大電路放大后,作為門限鑒別和噪聲檢測電路的輸入信號。根據系統探測虛警率技術指標要求設置判決門限,由門限鑒別和信號處理電路將回波信號整形為一定寬度的方波脈沖序列,并傳送給主單片機進行信號特征識別;由多門限噪聲檢測電路檢測判決點處的噪聲,并將檢測結果通過接口電路傳送給單片機AT89C2051,單片機AT89C2051根據判決點處的噪聲狀況,通過D/A電路AD7524,控制DC/DC變換電路產生APD工作偏壓。時序控制和信號處理電路,在系統控制信號的作用下,產生盲區控制、抑制后向散射干擾和距離波門控制信號,以便提高系統的抗干擾能力,降低誤碼率。
全方位PIN激光接收系統
全方位PIN激光接收系統的任務是接收全方位的激光脈沖及其方位信息,識別鑰匙密碼,其工作原理見圖8。
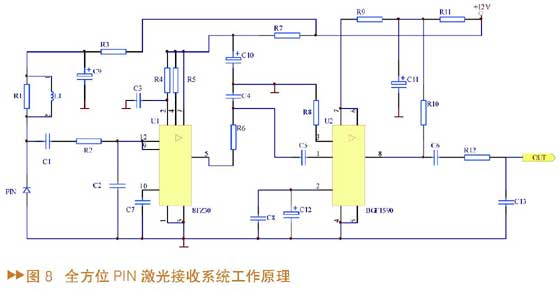
在自由空間光電信號探測系統中,廣角PIN光電接收機除接收到激光信號外,還將接收到探測器空間和頻率范圍內較強的背景輻射,使接收信噪比降低,影響光電接收系統的性能。背景輻射光源可分為兩類:
1、擴展背景,這種光源被假定為充滿整個背景,因此它出現在整個接收機視場內;
2、分立光源或點光源,它們比較局域化,強度也較大,可能出現也可能不出現在接收機視場內。在空間系統中,天空是主要的擴展背景,而局域化光源對應于星體、月亮和太陽等等。背景輻射成為空間光電探測系統的主要噪聲源。
系統精度分析
激光敵我識別系統的工作波長為0.904μm,6個PIN探測器和1個APD光電接收器,用以實現360°全方位激光接收,系統工作距離,地對地大于3km,地對空大于6km。
識別準確度
系統軟件容錯能力主要與采用的識別碼有關,本系統采用的識別碼由8位同步碼和200位信息碼組成,同步碼的作用是使對方能識別信息碼的首位而使其同步。發送方循環發送五次,接收方循環接收5次,5次判別同步碼,3次判別信息碼,判別原則是同步碼符合且3次信息碼中有1次以上相同,則判別為友方。其中循環發送是為了保證接收方能收到,多次判別是為了減少誤碼率。發生誤判的可能情況:
1)把敵方識別為友方。
此種情況下,發送的同步碼有8位相同,該情況發生的概率:
Pe<1/28
即:Pe<0.00024。
2)把友方識別為敵方。
這種錯誤的產生可能有兩種原因,一種是不能識別同步碼,如果系統5次找不到同步碼將判斷為敵方。另一種是信息碼傳輸發生畸變,由于友方傳送來的密碼中與預定密碼不相同,所以將友方識別為敵方,說明至少有9位以上的信息碼在傳輸中發生畸變。經計算,這樣的概率小于0.00013。
識別時間
識別時間有詢問方發送激光束的時間、延時時間和發送接收同步過程所耗的時間構成。微機系統進行信息判別的時間可以忽略不計。
1)發送光束時間
由于發送方循環發送5組編碼,每組編碼長為200bit,則總長為1000bit,激光器的調制頻率為10kHz,所以,單程發送時間為100ms。來回傳輸總時間為200ms。
2)延時時間
設計延時時間的目的是為等待戰車敵我識別后打開射頻發射器,它由判別時間和射頻天線陣列調整方位的時間決定,經過估算略為400ms。
3)發送并接收時系統的處理時間略為300ms
綜上所述,系統總的識別時間大約為900ms,滿足戰場作戰快速反應的需求。
結語
本文參照第三代主戰坦克激光敵我識別及輔助通信系統,主要從理論和實踐兩個方面論述該系統的設計與研制等有關技術問題。重點對電控部分進行詳細的介紹,包括激光發射系統、APD回波信號探測系

電路相關文章:電路分析基礎
數字通信相關文章:數字通信原理
脈沖點火器相關文章:脈沖點火器原理 激光器相關文章:激光器原理
評論