基于dSPACE的雙繞組感應發電機實時控制系統研究

新型雙繞組感應發電機定子嵌有兩套極數相同的繞組,一套為功率繞組,輸出端接勵磁電容、整流器負載:另一套為控制繞組,接勵磁變換器,可為發電系統連續調節勵磁,保持功率繞組輸出電壓不變。雙繞組感應發電機系統的數學仿真包括發電機、功率半導體、控制器、測量裝置等多個數學模型。連續系統的數學仿真保證積分誤差處于規定范圍內,常采用動態調節仿真步長的方法提高仿真速度。在該發電系統的實時控制中,控制程序通常運行在DSP等嵌入式器件上,在固定的時鐘周期內完成控制程序,并對執行元件-功率半導體發出控制信號,這樣就存在諸如中斷延時、執行時間、硬件接口、測量誤差等瓶頸問題。解決上述問題的方法是將雙繞組感應發電機、功率半導體、傳感器等接入仿真回路,仿真系統按照實際時間工作,即可滿足實時性要求。這種半實物仿真形式也稱為快速控制原型。
本文提出一種基于dSPACE單板系統DS1104試驗平臺的離散事件勵磁變換器系統與連續時間雙繞組發電機系統解耦的實時仿真方法,建立相應的試驗模型,并對一臺雙繞組感應發電機系統進行試驗研究。
2 勵磁系統的控制策略
當雙繞組感應發電機轉速或負載發生變化時,應保持輸出電壓恒定,需要調節電機的勵磁無功,同時調節控制繞組側勵磁變換器直流側電容的有功功率。本文采用控制繞組定子磁場定向控制策略,雙繞組發電系統勵磁控制原理圖如圖1所示。
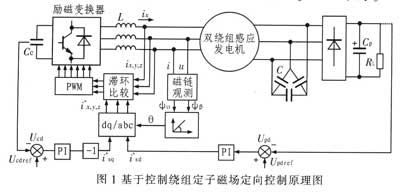
整個系統控制分為兩個閉環,其中將功率繞組整流橋輸出端檢測的輸出電壓Upd與所給參考電壓Updref相比較得到誤差信號,經PI調節器控制后得到參考無功電流分量給定值i*sd,來補償控制電機所需勵磁無功;根據控制繞組勵磁變換器直流側電容的電壓檢測值Ucd與所給參考電壓給定值Ucdref相比較所得的誤差信號,經PI調節器控制后乘以系數-1可得到參考有功電流分量給定值i*sq,來補償控制電容Cc所需有功功率,其中系數-1表示有功是從電機流向勵磁變換器。
3 實時系統硬件設計
dSPACE實時仿真系統是基于Matlab/Simulink的控制系統開發及測試平臺,與Matlab/Simulink完全無縫連接。本文采用的單板系統DS1104是由主處理器、輔助DSP、中斷控制器、儲存器、計時器以及主機接口等部分組成。DS1104控制器板使用Pow-
erPC處理器進行浮點運算,其主頻為250 MHz,運算能力強。DS1104控制器板還集成了TMS320F240DSP為核心的I/O子系統,滿足特殊的I/O要求。
dSPACE軟件系統由算法開發模塊、實時運行模塊以及實時測試監控模塊3部分組成。基于dSPACE的雙繞組發電機控制系統開發包括:
(1)LAB/Simulink模型建立及離線仿真。利用Matlab/Simulink建立雙繞組感應發電機仿真對象的數學模型,設計控制方案,并對系統離線仿真。
(2)I/O的接入。Matlab/Simulink中保留需要下載至SPACE的模塊,利用硬件接口關系代替原邏輯連接關系,配置I/O,設置軟硬件中斷優先級。
(3)利用RTW和dSPACE提供的工具自動生成代碼并下載,將模型轉換為實時仿真機可運行的程序。
(4)dSPACE綜合實驗和調試。利用ControlDesk獲取實時仿真數據。
功能強大的實時代碼能實現軟件RTI與界面友好的試驗軟件ControlD-esk,可快速建立雙繞組感應發電機實時控制系統平臺。系統硬件連接原理圖如圖2所示。硬件電路包括由勵磁變換器、發電機、整流型負載組成的主回路,而以DS1104為核心的控制回路包含定子雙繞組電壓、電流檢測,直流母線電壓的檢測電路和保護電路等。
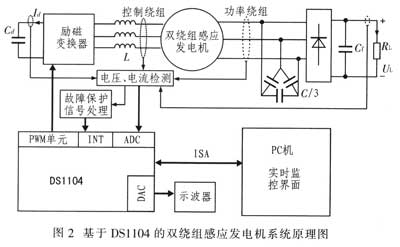
本系統設計含有10路A/D采樣電路,該A/D采樣電路用于采樣控制側母線電流電壓、控制側兩相電流(三相中只有兩相電流是獨立的)、功率側兩相電流電壓以及功率側母線電流電壓等。選擇其中所需的采樣通過同軸電纜分別與DS1104的8個ADC單元相連,主要包括:控制側電流檢測、功率側電流檢測、控制側電壓檢測、功率側電壓檢測。
另外,采用復雜可編程邏輯器件(CPLD)綜合處理故障信號。本系統設計含有16個保護信號輸入,經過“相與”后產生一個FAULT信號輸入至DS1104控制器板的主處理器,主處理器產生硬件中斷信號,使程序在Matlab軟件中停止運行,同時,還輸出一個BRAKE信號在控制平臺硬件上直接關閉PWM信號,實現實驗平臺的雙重保護。這16個保護信號經過處理后輸出14個低電平有效的顯示信號,使對應的LED發光報警。
該控制方案在一臺由三相感應電動機自行改制的1 500 rpm,900 W的小樣機全數字控制平臺上進行驗證,設計PI可調的實時仿真界面。控制器系統周期為80μs,數字滯環的寬為0.5 A。
4 試驗研究
4.1 系統自勵建壓
采用105μF的自勵電容自勵建壓,當功率側直流電壓達到120 V時即轉入控制繞組磁場定向矢量控制,在額定轉速空載下的自勵建壓試驗波形如圖3所示。
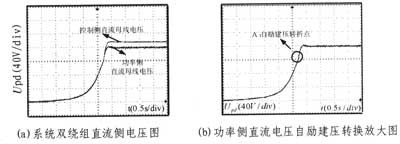
圖3額定轉速空載下的自勵建壓試驗波形圖
由于整流橋直流輸出側采用較大的濾波電容,圖3所示的功率側直流電壓在建壓穩定后始終是平直光滑的,幾乎沒有較大波動。
4.2 勵磁電容C=105μF額定負載時的變速過程
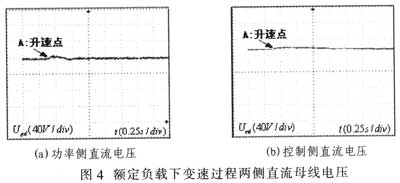
系統帶額定負載時,轉速從1 500 rpm快速增加至2 000 rpm,此過程采用控制繞組的電壓定向控制策略,功率側直流電壓上升至9 V,約為5.6%,如圖4所示。
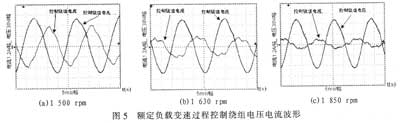
額定負載時變速的控制繞組電壓電流的波形如圖5所示。額定負載運行時,控制繞組線電流滯后于線電壓約120°(相電流滯后于相電壓約90°),由于電壓電流參考方向是按照電動機慣例,此時控制繞組勵磁變換器具有電容作用,向發電機提供所需無功,滿載運行時,由于去磁效應,勵磁電容不能提供發電機所需的無功,此時需要控制繞組補償,且隨著轉速的升高,發電機所需無功下降,控制繞組的電流越來越小,符合電機轉速升高弱磁原理。
5 結束語
本文采用dSPACE單板系統DS1104試驗平臺的離散事件逆變器系統與連續時間發電機系統解耦的實時仿真方法,將雙繞組感
應發電機-逆變器-傳感器取代數學模型,直接置入仿真回路,進行半實物仿真研究,內容包括:系統建壓、額定負載的變速運行等,研究結果表明,將dSPACE應用于雙繞組感應發電系統中,有利于縮短開發周期,降低開發成本,提高系統運行的可靠性。 合成孔徑雷達相關文章:合成孔徑雷達原理






評論